kiwamu.izumi@LIGO.ORG - posted 07:27, Friday 21 February 2014 (10238)
BS oplev loop should be automatically disabled when it is tripped
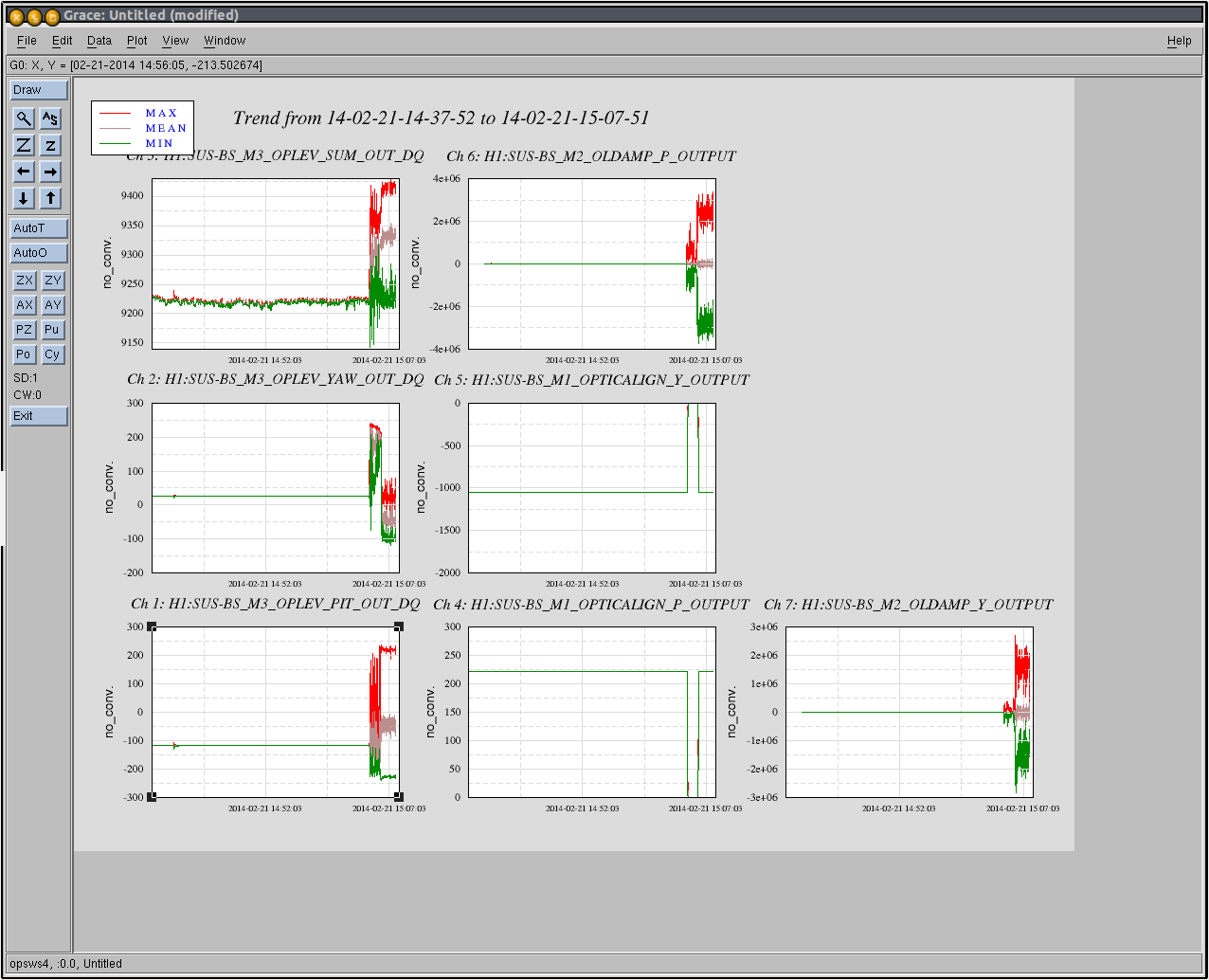
I accidentally tripped the BS suspension and therefore I had to untrip it using the guardian. After bringing it to "damped" and "aligned" states, I noticed that the oplev entered the crazy state where it keeps oscillating (see the attached trend). I believe this is due to some nonlinearity in the error signal particularly when the BS wobbles a lot and I have seen this before.
Anyway, I think that we should tell the guardian to disable the oplev loop when it is down.
Images attached to this report