arnaud.pele@LIGO.ORG - posted 16:04, Tuesday 01 April 2014 (11104)
quad oplev damping - model changes -
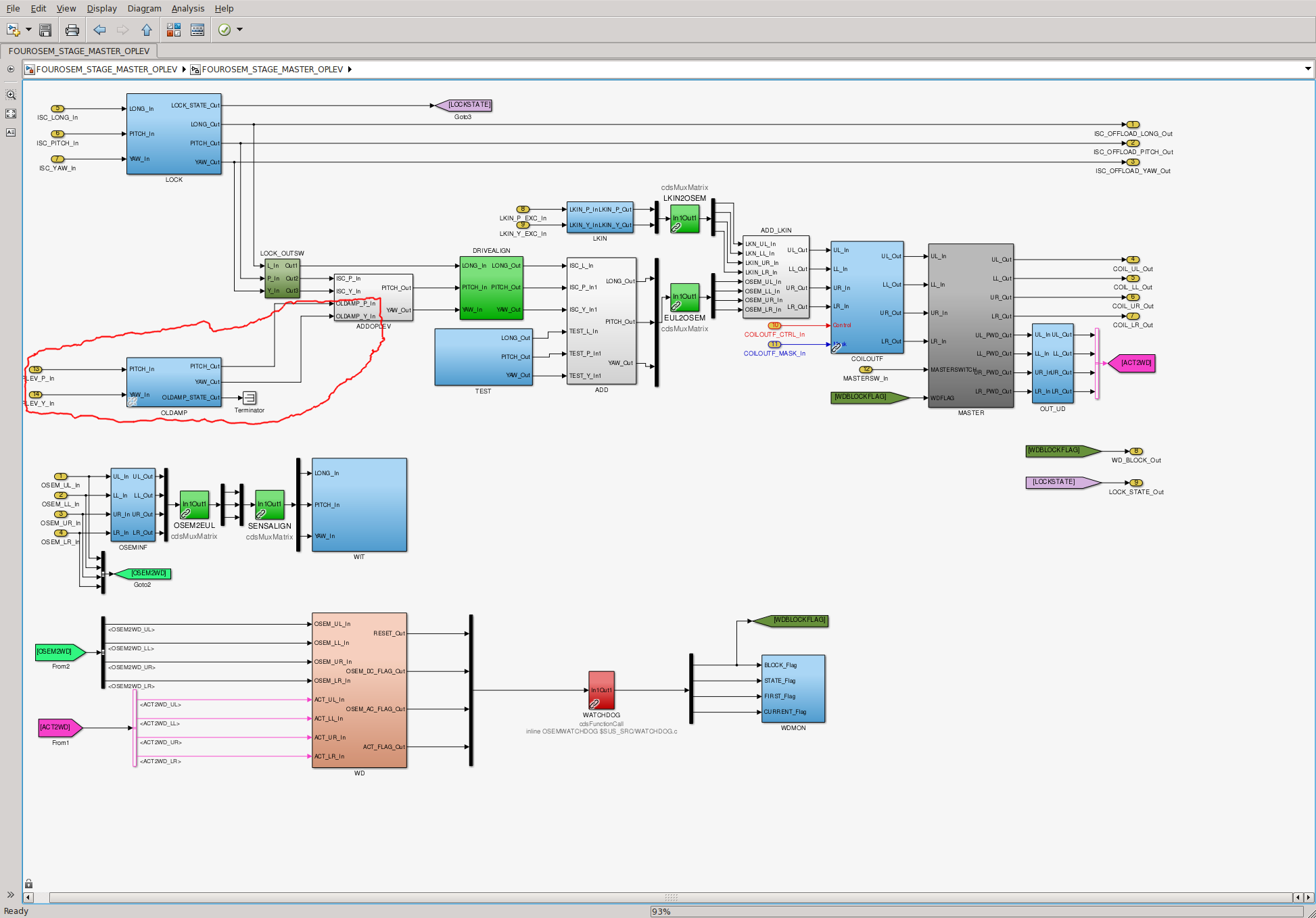
Since oplev damping might be used for Y arm commssioning as it is currently for X arm, I modified the QUAD_MASTER simulink model to have oplevs feedback on all the quads.
- Created a common part called FOUROSEM_STAGE_OPLEV.adl living in /opt/rtcds/userapps/trunk/sus/common/models (copied from FOUROSEM_STAGE.adl) with a new path linking the oplev signal to UIM and PUM actuation (going through the DRIVEALIGN matrix) cf first screenshot.
- In QUAD_MASTER, the L1 and L2 parts were replaced with the newly created "FOUROSEM_STAGE_OPLEV"
- Hooked back h1susetmx and h1susitmx to QUAD_MASTER
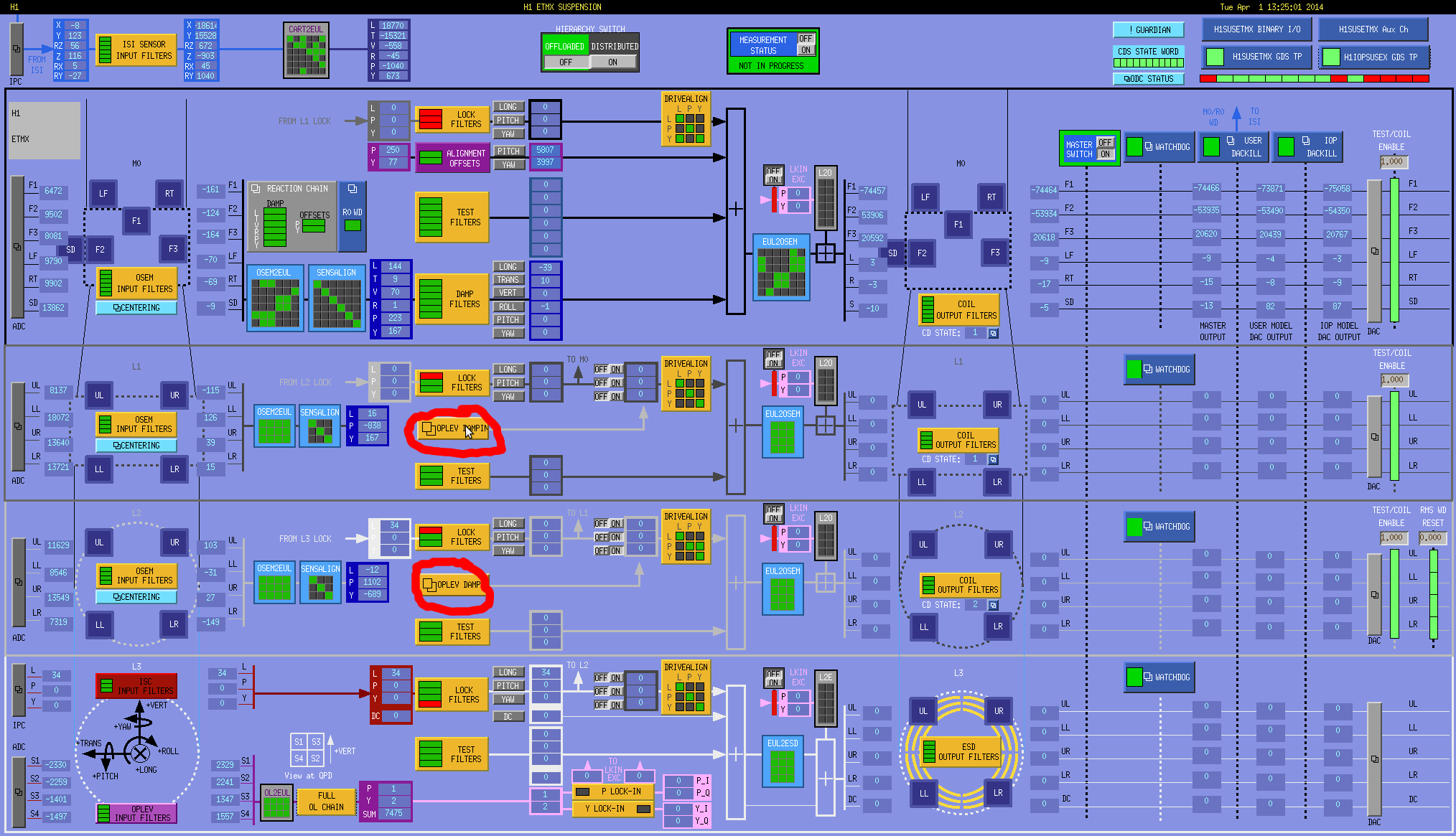
- Modified the medm screens : Added a menu button at UIM and PUM levels. This screen might need to be revisited for clarity. Stuart is making a similar change at LLO with a better looking screen, so we will update when change is commited
- Took safe snapshots of the four quads with oplev switches off
Only FOUROSEM_STAGE_OPLEV.adl part was commited to the svn
Images attached to this report