brett.shapiro@LIGO.ORG - posted 16:03, Monday 21 April 2014 (11477)
Full State Feedback Damping Simulation
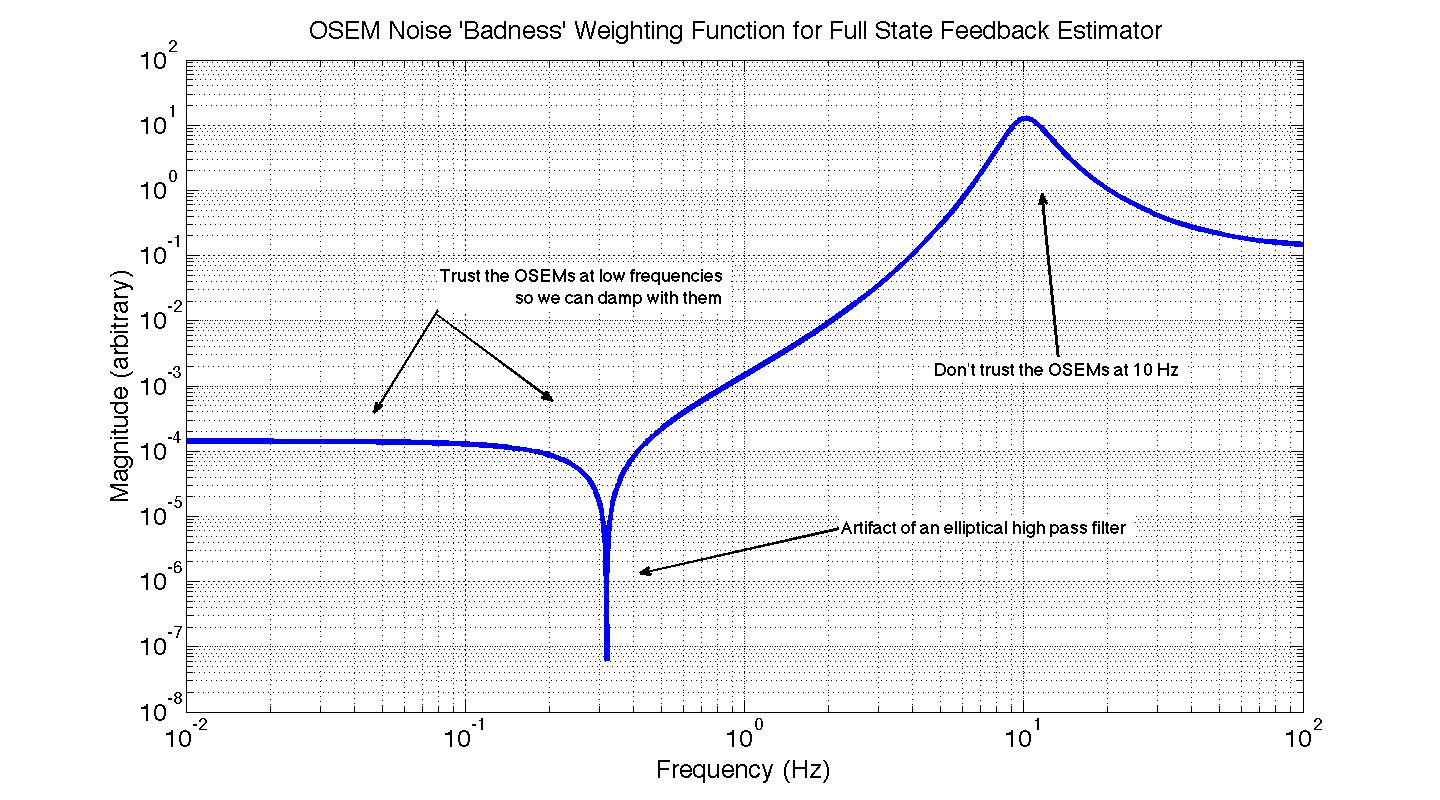
This log expands on LHO alog 11342. The intention is to completely damp out the first two coupled longitudinal and pitch modes of the quad to make the cavity lock more robust. Full state feedback is advantageous in that you can specify how much damping you want the controller to give you, and it just gives you that controller. In this case, I asked for a Q of 0.67 on the ~0.5 Hz is long-pitch modes. The controller is obtained using the MATLAB 'place' function. Previously, in log 11342 I did very little to optimize the noise performance. In this case I improved the 10 Hz noise performance by 3 orders of magnitude without comprising the amplification of the ~0.5 Hz long-pitch modes. This was done by designing the estimator with the MATLAB LQR algorithm in the frequency domain (ref T1300301). An estimator is needed because full state feedback requires knowledge of all stages of the pendulum. See the attached plots in the pdf. The first page shows a transfer function from longitudinal motion of the quad's suspension point to test mass pitch. The second page shows an impulse response of the same input and output. The 3rd page shows the expected OSEM sensor contribution to the cavity from both the longitudinal and pitch OSEM noise. In all cases the bright green curve is a simulation with the currently installed damping filters, the red curve is full state feedback as given by LHO log 11342, the blue curve is the new response with the optimized estimator. Note that the 10 Hz noise in the new design is only about a factor of two from the 1e-20 m/sqrt(Hz) 10 Hz technical noise requirement. The jpg figure shows the weight applied to the optimized estimator for trusting OSEM signals. Small weight means we trust the OSEMs (for useful damping), high weight means we don't trust them (for filtering the noise). The limitations of this design, like the previous full state feedback design, are that the OSEM noise below 5 Hz is really bad, it is not AC coupled, it is not unconditionally stable (goes unstable if you ramp it off/on), and implementing it would require modifying the frontend simulink model. It might be possible to reduce the < 5 Hz noise with a global damping approach to this. Hard to say without more study since much of the noise is from pitch, not longitudinal. Many of the other limitations likely have some workarounds. For example (thinking out load here) making the 'plant' AC coupled with a pre-filter and controlling that lumped system; perhaps switching between damping schemes instantaneously does not cause much of a disturbance if both are AC coupled.
Images attached to this report
Non-image files attached to this report
