I've done some tests on ITMY, trying to reduce the excessive YAW motion seen by the OPLEV. Our guess is that there is some magnetic coupling/interaction between the actuators and the T240s: we can observe some pickup in RZ when the Z controller is ON.
I've tried 3 different configurations:
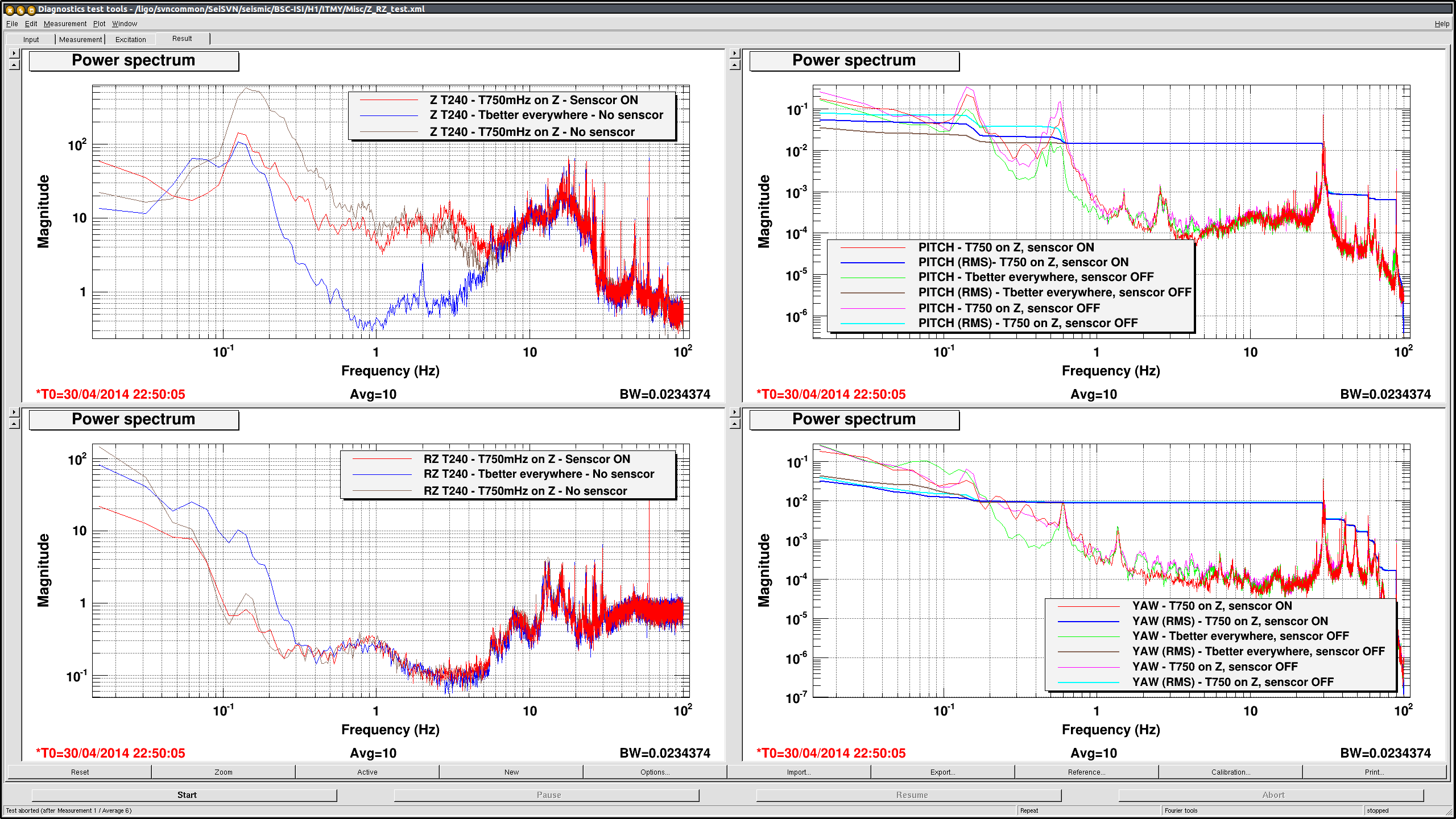
1) ISI controlled with Tbetter blends everywhere
ref config
2) ISI controlled with T750mHz on Z (stage 1 & stage 2)
By putting a higher blend, we relax the force induces by the actuators and therefore the pickup in RZ
3) ISI controlled with T750mHz on Z, HEPI Senscor Z turned ON
By turning on the sensor correction on HEPI we improve our performance in Z at the microseism.
See plot attached
In the third configuration, we obviously degraded PITCH, but improved a little YAW. More tuning might lead to a better trade off.