arnaud.pele@LIGO.ORG - posted 21:44, Monday 12 May 2014 - last comment - 21:11, Tuesday 13 May 2014(11832)
ETMX UIM length to pitch decoupling
After Sheila saw some excess angular motion caused by the length drive, I tried improving the decoupling of EX and EY UIM.
- We took a swept sine measurement of Length to Pitch as well as Length to Yaw on friday night, driving through L1_LOCK_L_EXC, monitoring the oplevs, without any decoupling filters engaged. The measurements are saved as 2014-05-05_H1SUSETMX_L1L2PY_SweptSine.xml under SusSVN/sus/trunk/QUAD/H1/{ETMX/ETMY}/SAGL1/Data
- Those measurements were used to make a new fit, with a better resolution of Qs and phase than previous filters. See both pdfs for the fits of L2P w new measurement, P2P w old measurement and the ratio L2P/P2P
- The old filters were moved in FM6 for ETMX and FM6/FM7 for ETMY. They are called L2Plegacy
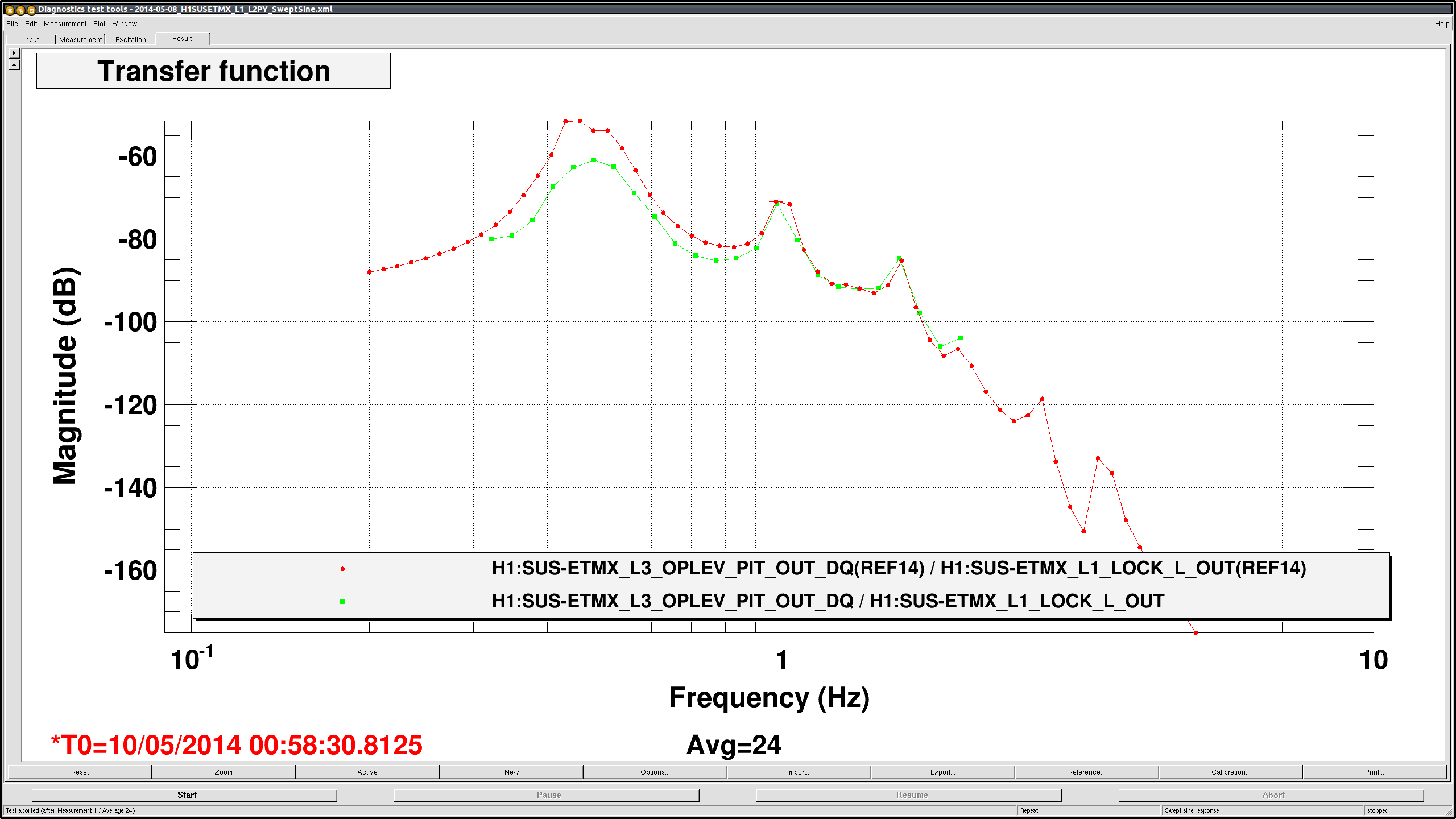
- A measurement was taken to test the L2P decoupling on EX, cf attached screenshot EX_UIM_decoupling. Even though the fit is pretty good, we only see 10dB attenuation in the .5Hz region (green w decoupling filters vs red without). Keita advised to tweak the overall gain.
- By doing quick tests its unclear if L2Y is providing anything good. I left the drivealign UIM input switches off for now. Will do more investigation tomorrow.
Images attached to this report
Non-image files attached to this report

Comments related to this report
- Remeasure both L2P and P2P at just one frequency and see if they agree with the old measurements.
- If one is good but the other isn't, the bad one was likely measured with different SUS configuration (e.g. oplev damping on/off, length drive being routed the higher stage, etc.). Remeasure the bad one for the entire frequency band.
- If both are bad, start from scratch.
- If both are good, that only means that the fit and/or inversion sucks. Since the fit looks OK (as in it's not great but it's expected to do something good), suspect dumb inversion error. Start by injecting a line at the same frequency as the step 1., tune the L2P gain and optimize. See if there's something fundamentally wrong.
[Keita Arnaud]
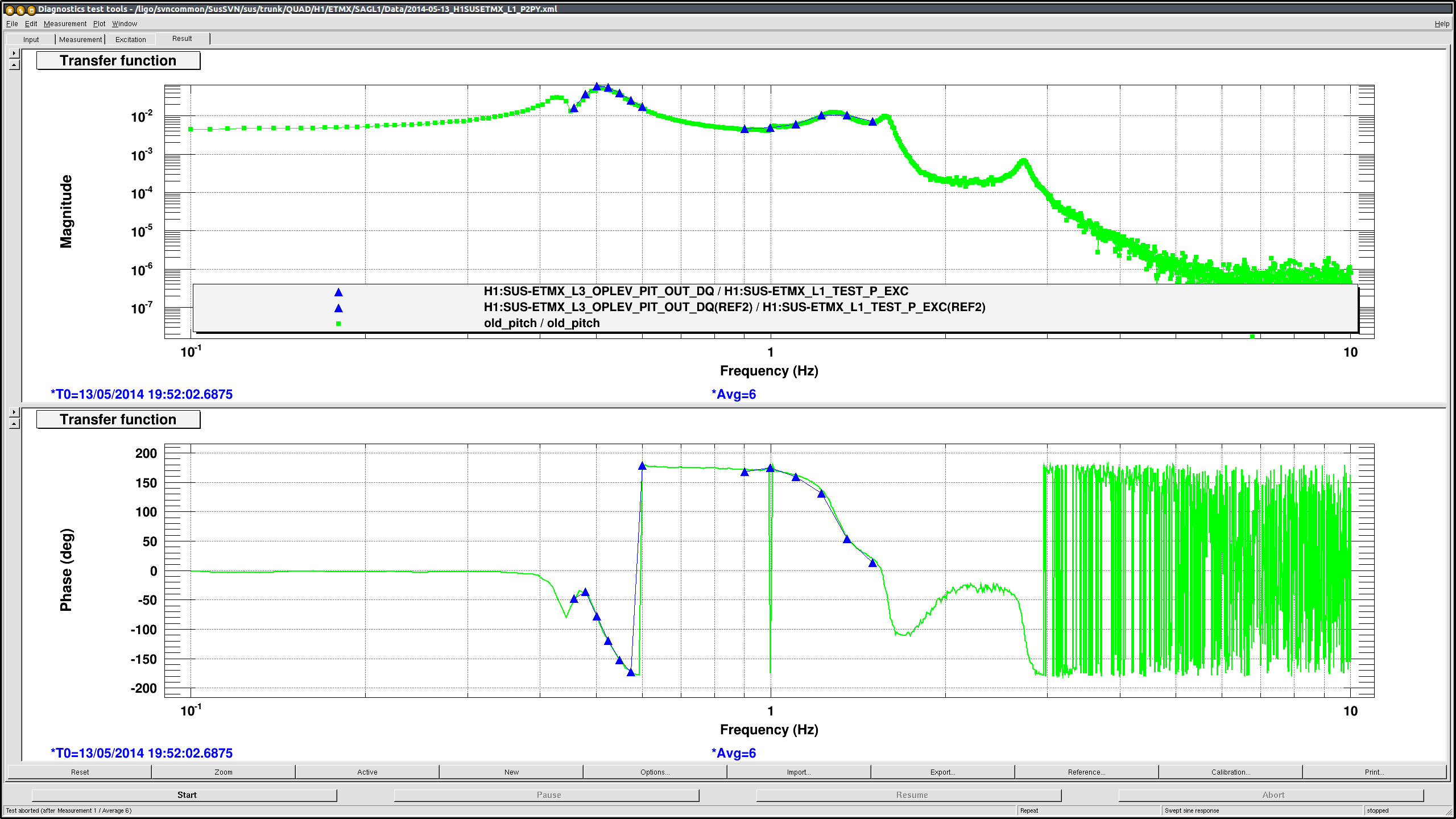
- P2P was remeasured for few frequency points (0.5Hz region and 1Hz region) with only top mass damping engaged, and compared with the one taken in March 20th 2014. It matches well with the old measurement (the first image shows the old measurement in green, vs the one from today in blue)
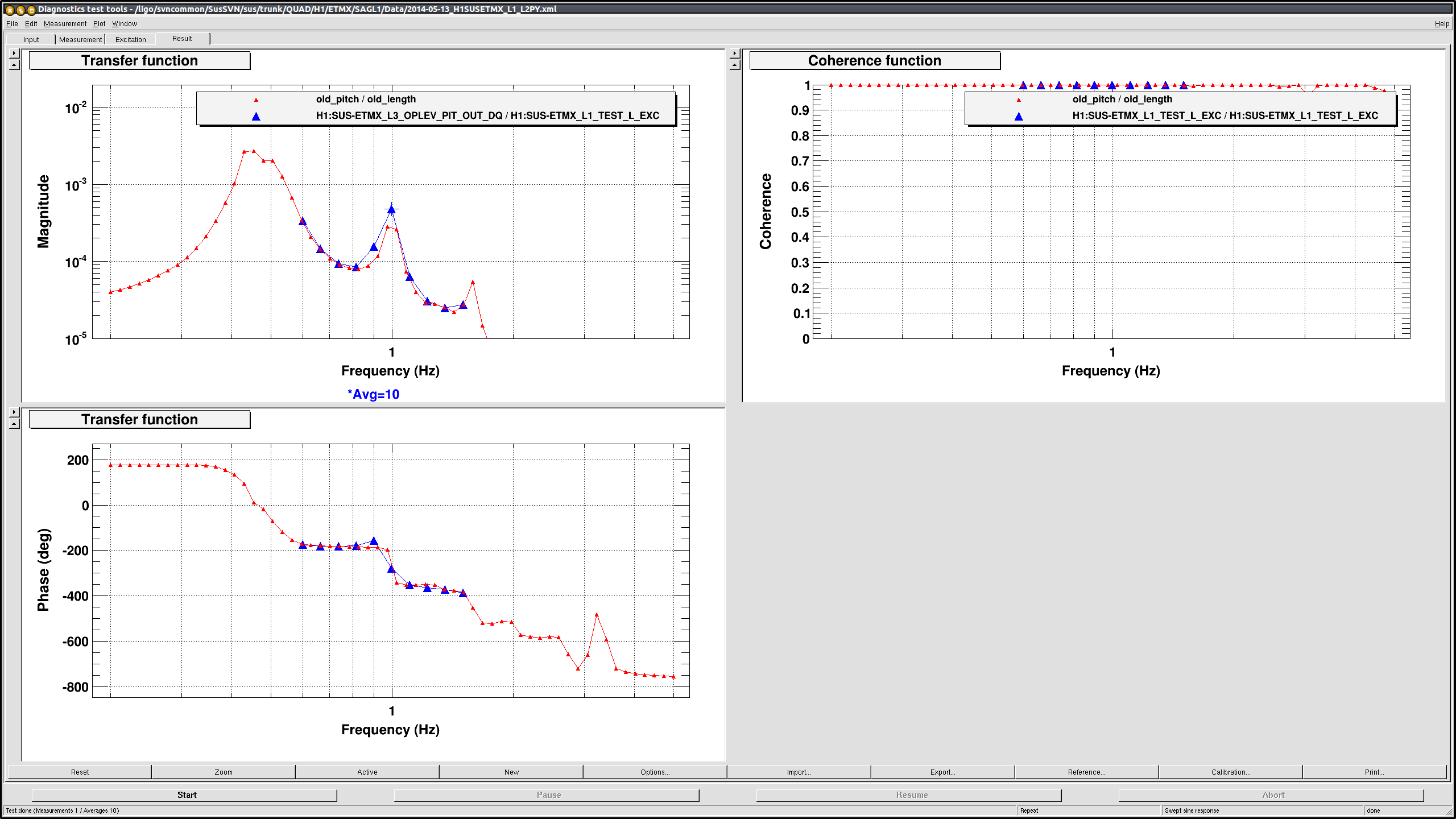
- Same thing was done for L2P. New TF matches with one from friday, except maybe for the 1Hz Q which appears lower today (function of the drive?). 2nd image shows friday's L2P in red, and today's L2P in blue
- From that we are assuming the measurements used for the fits were ok.
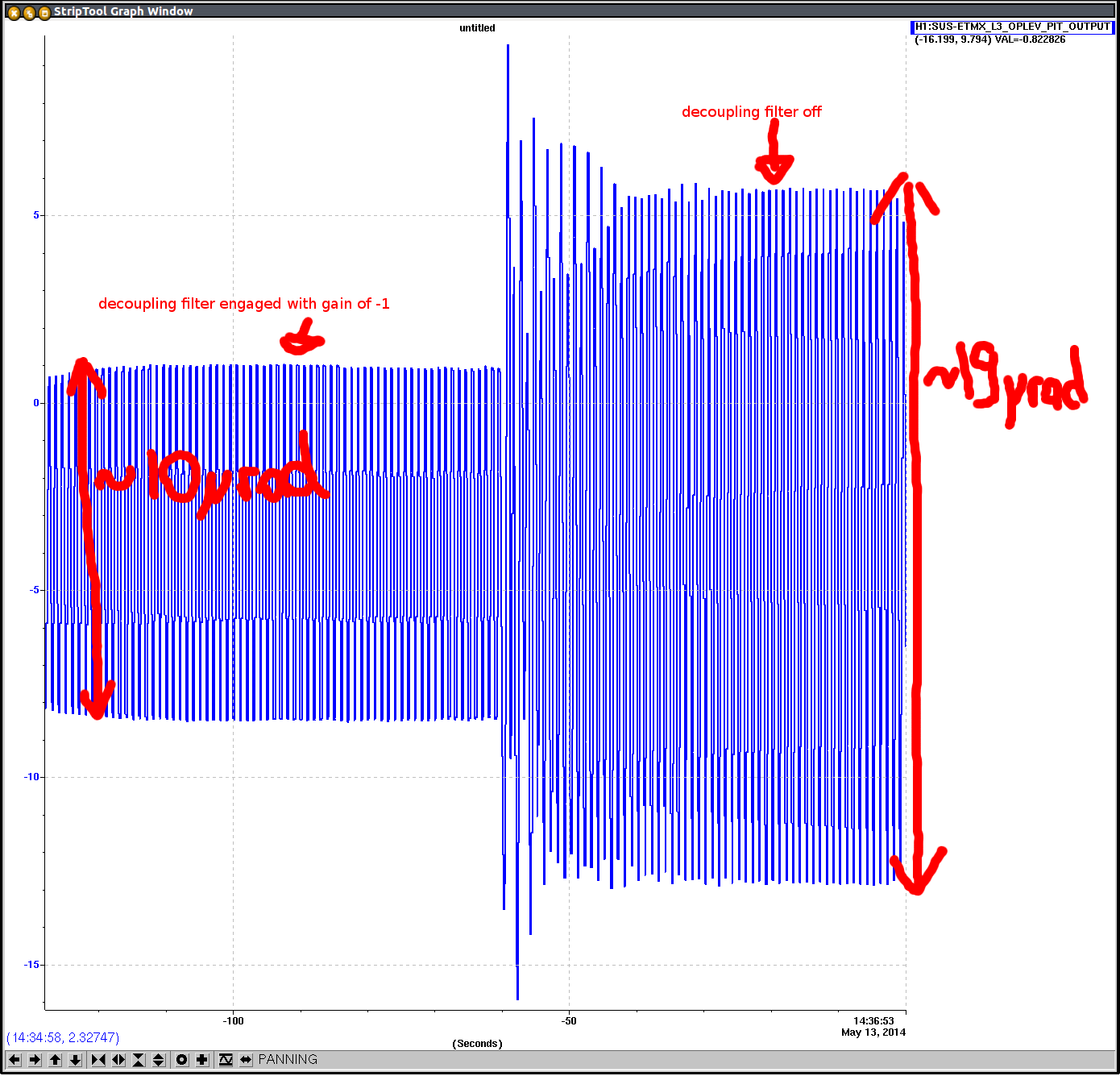
- Then to make sure the filter was actually doing something, we injected a sinewave at 1Hz (Amplitude of 10000) with awggui, with the same decoupling filter (L2P/P2P) engaged, and moved the gain around. The minimum pitch motion while driving in length was found for a gain of -1. Last image shows the difference filter on, w gain of -1 (first part) and filter off (second part). There is a factor of ~2ish improvement between the peak to peak amplitudes
- for Jeff I added the residual in the fitting plots ! (cf attached pdf)
Measurements live in /ligo/svncommon/SusSVN/sus/trunk/QUAD/H1/ETMX/SAGL1/Data called 2014-05-13_H1SUSETMX_L1_{L/P}2PY.xml
Images attached to this comment
Non-image files attached to this comment