We are investigating the Z to RZ couplings that are currently limiting our ability to improve the Yaw isolation.
A measurement was performed on ITMY yesterdaty night. The unit was controlled with level 3 controlers and high blend (T750mHz) in all 12 degrees of freedoms.
It has been driven at the Exc point of the Stage 1 Z isolation filter, therefore the drive was in [nm]. A white noise drive was used (filtered to put power on the low frequencies)
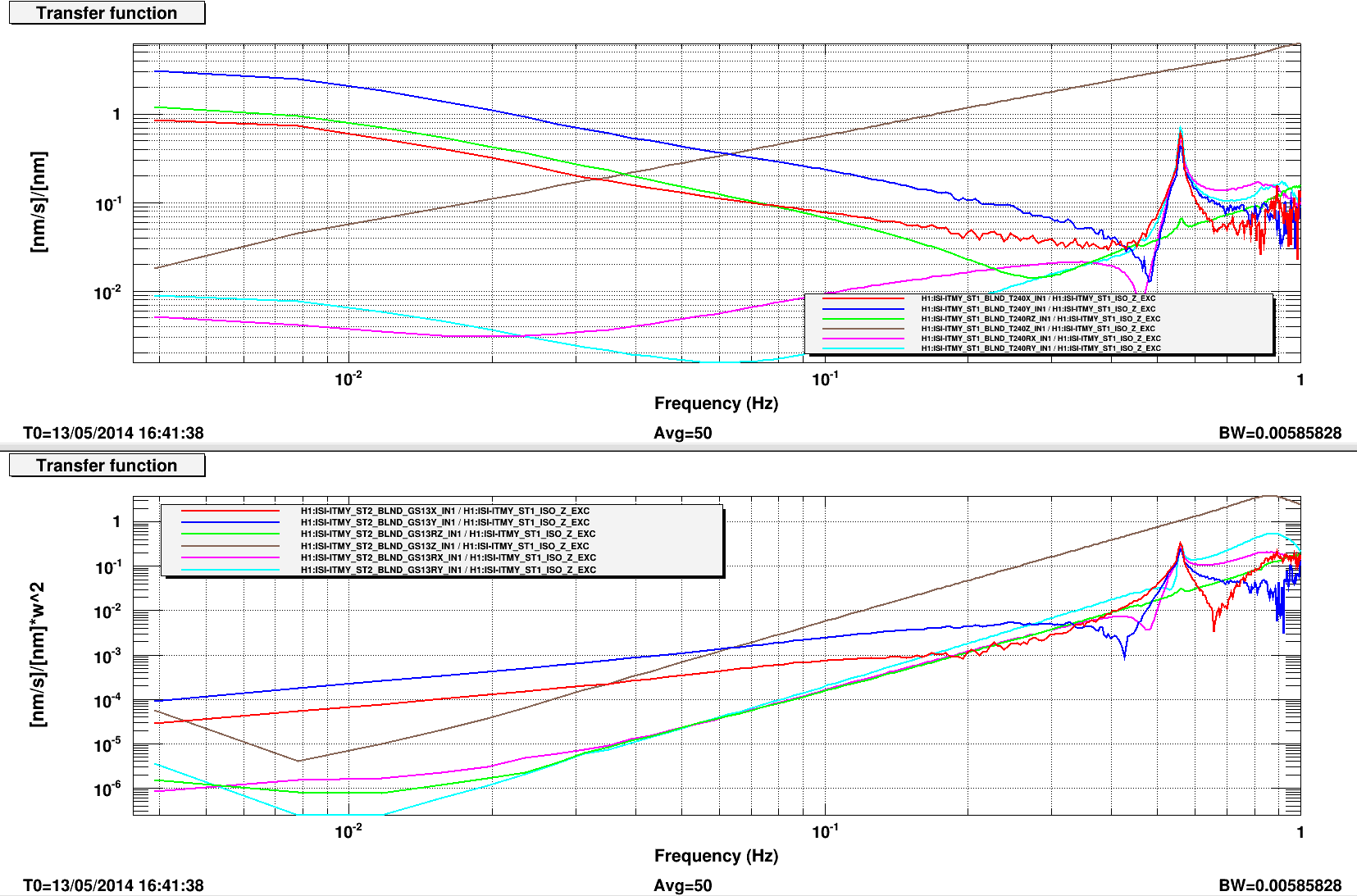
The plot attached shows the reponse of the inertial sensor. The top plot (Stage 1 T240s) are in [nm/s], [nrad/s] per unit of drive [nm]. The bottom plot (Stage 2 GS13s) are in [nm/s^3], [nrad/s^3] per unit of drive [nm].
The Z, RX, and RY response are as expected: slope goes as f, large main coupling, cross coupling at sub-percent level...
X, and Y couplings are in high in the T240s, but suprinsingly the coherence is not very good.
As for RZ, which is the main focus of this measurement:
- the T240s show a 1/f slop that we assume is due to magnetic couplings
- the GS13s shows the f^3 slope as expected, confirming the signal on the T240 is likely not real motion.
We have set up a measurement in the staging building to measure the direct coupling from one actuator to the T240s.
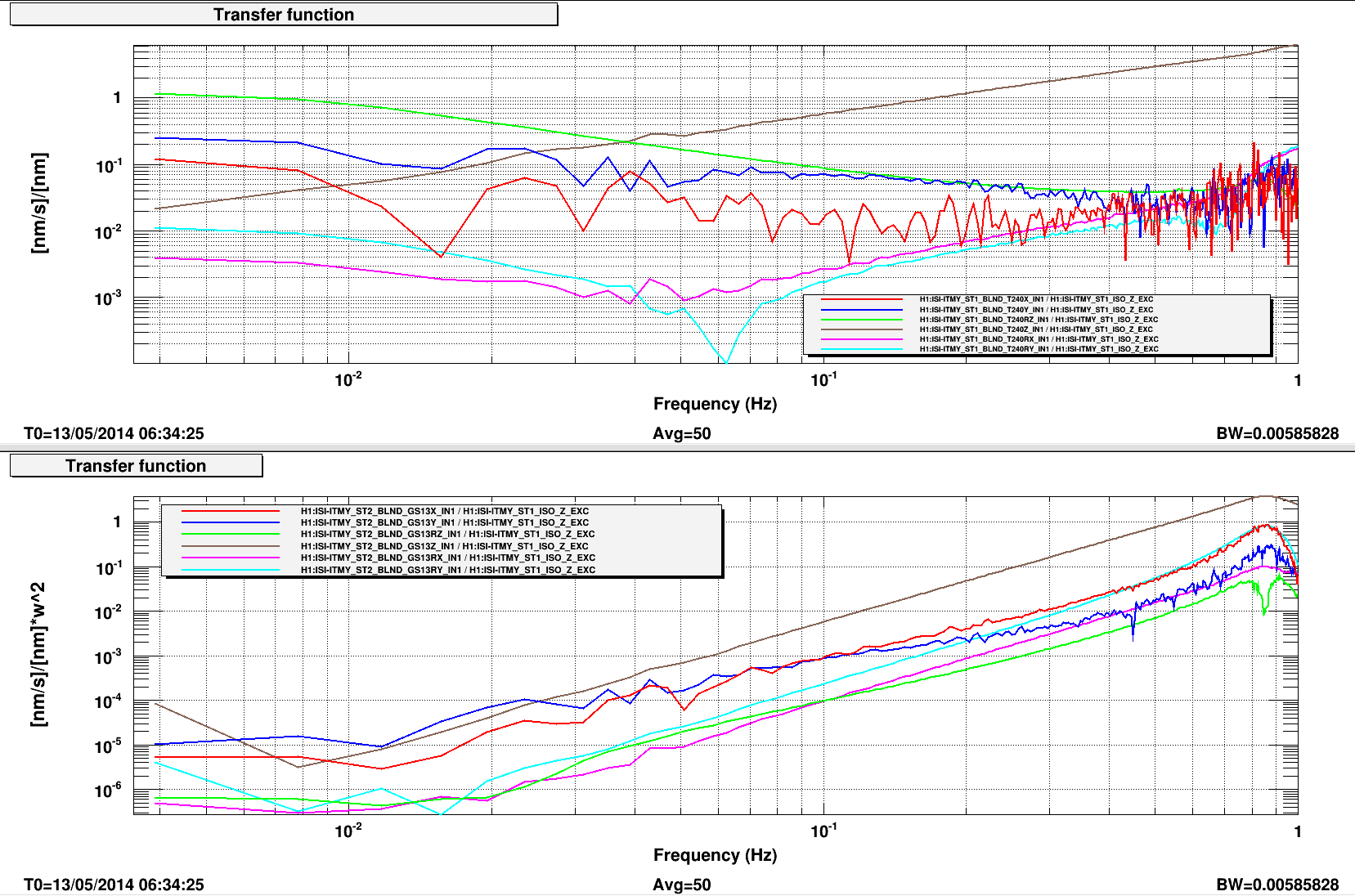
Just started a similar measurement on ITMY, with all isolation loops off except Stage 1 Z and Stage 2 Z that is still on.
Jeff will stop the measurement when the maintenance adctivites start on this unit (I will be in the staging building for the direct coupling measurement)
Here are the results with only the Z loops engaged. The X and Y and couplings are much higher, presumably because of higher tilt-coupling when the RX and RY isolation loops are off. The coupling with all other degrees of freedoms is essentially unchanged.