arnaud.pele@LIGO.ORG - posted 16:26, Wednesday 14 May 2014 (11902)
ETMX YAW motion from ISI : using Start Rz blends for now
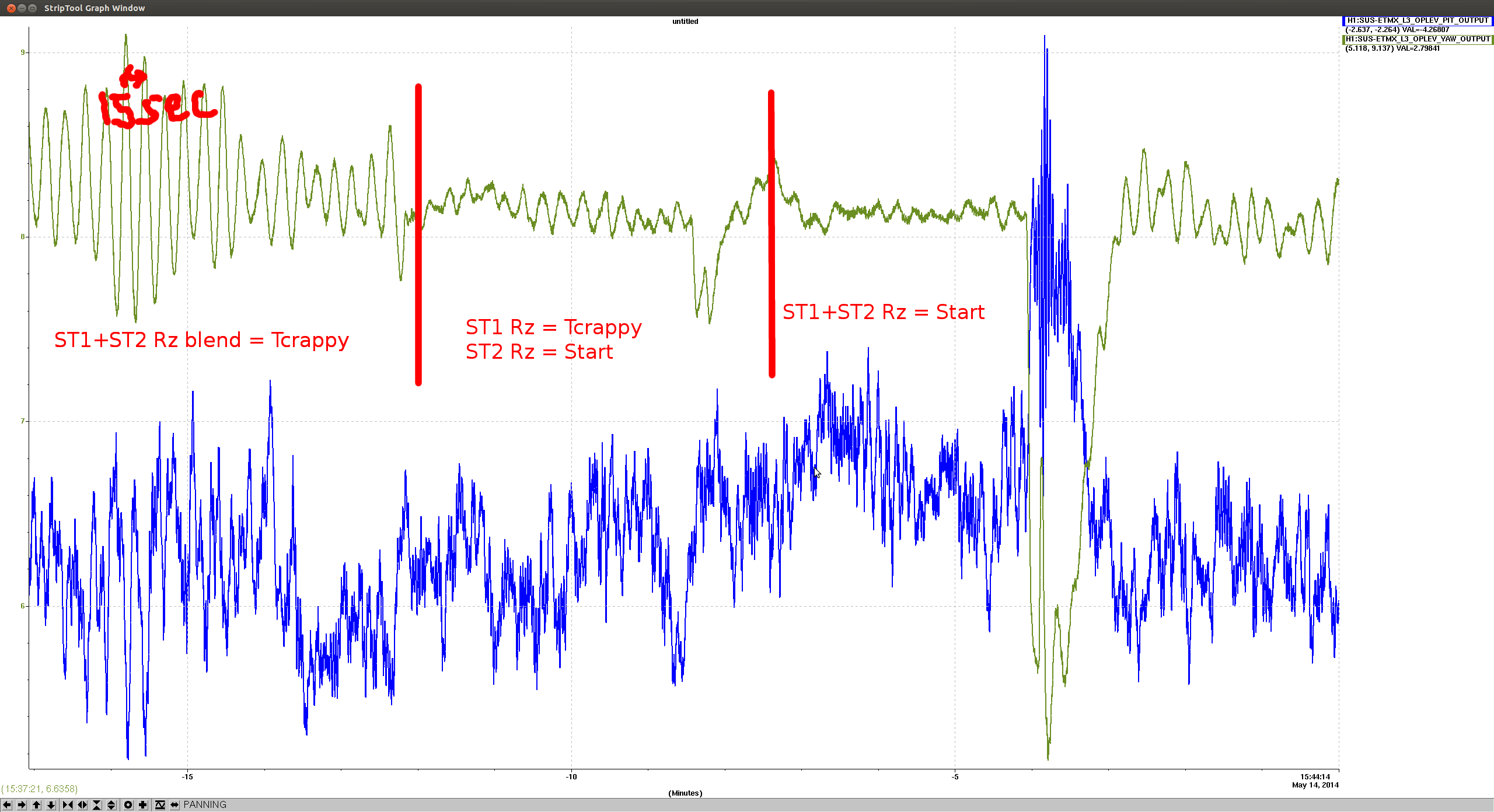
While working on EX suspension, I realized the yaw motion was big on the oplev, so I tried switching the Rz blends on the ISI to see what's a good config. Moving the Rz blends of both stages from Tcrappy to Start seem to have helped (~0.6urad peak to peak -> ~0.2urad). Green curve in attached plot is the oplev yaw signal (urad)
Images attached to this report