arnaud.pele@LIGO.ORG - posted 18:17, Monday 11 August 2014 - last comment - 21:05, Tuesday 12 August 2014(13305)
MC2 top mass dc coupling
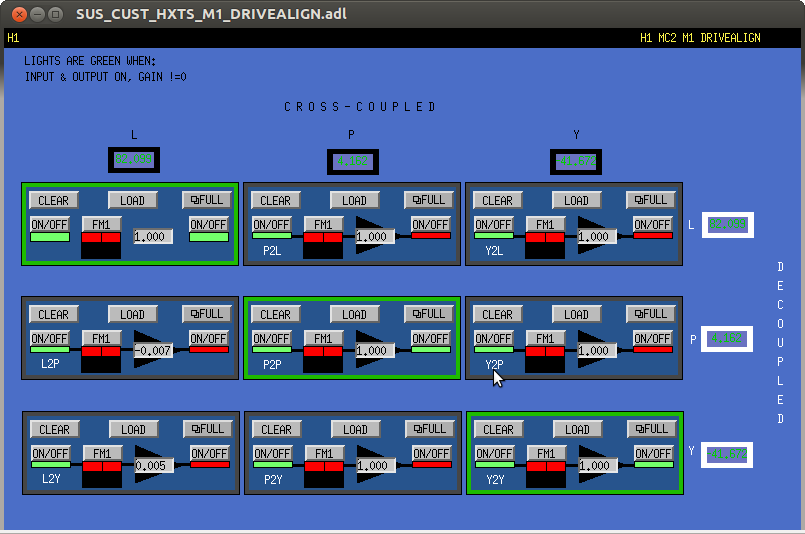
Gains to decouple bottom mass (pitch and yaw) angular motion from top mass longitudinal drive at DC were implemented in L2P and L2Y components of the top mass drivealign matrix of MC2 using the dc magnitude of the top to bottom L2P (urad/Force cts) and P2P (urad/Torque cts) for length to pitch decoupling and L2Y, Y2Y for length to yaw decoupling. This should be tested.
|
alpha [urad/Force cts] |
beta [urad/Torque cts] |
alpha/beta [Torque cts/Force cts] | |
| in pitch | -3.90E-03 | 5.37E-01 | -7.26E-03 |
| in yaw | 2.20E-03 | 4.11E-01 | 5.35E-03 |
Images attached to this report
Comments related to this report
Attached are the plots of the undamped top to bottom TFs with cross couplings terms. The data cursor shows where I get the numbers from the table above from. The minus sign for Presp/Ldrive comes from the -180 degrees phase.
Non-image files attached to this comment
