With the new Parker Vlave on H2, ran Range of Motion and Linearity tests on the system. Before I could do that I saw that a zeroing of the IPS was in order. Some sensors were too far out to really test the range of the Actuator. Rezeroing the IPS will change the Cartesian Basis Positions and therefore the loop targets. I trended the Positions back to IFOX and then applied the free floating to Isolated deltas to the new near-zero positions for RY & RZ. Remember too that EndX had the large Ry tilt for the TMS pointing. Keita turned off the pitch loop and then adjusted the TMS accordingly. Anyway, straight forward shift it was that and is now this:
| Pos |
Target |
|
| X | -6100 | -6700 |
| Y | -10000 | -10600 |
| Z | -14300 | -15200 |
| RX | -9100 | -9100 |
| RY | -2900 | -1800 |
| RZ | -600 | 7300 |
Guardian only holds the RZ and RY targets(at EndX;) the other DoFs are locked to the free hang position at the time of Isolation start so will drift around with the usual HEPI hysteresis. The other targets I just grabbed and are really only for reference. If the free hanging position is terribly far from these numbers (no, I don't know what too far is..) something may be amiss.
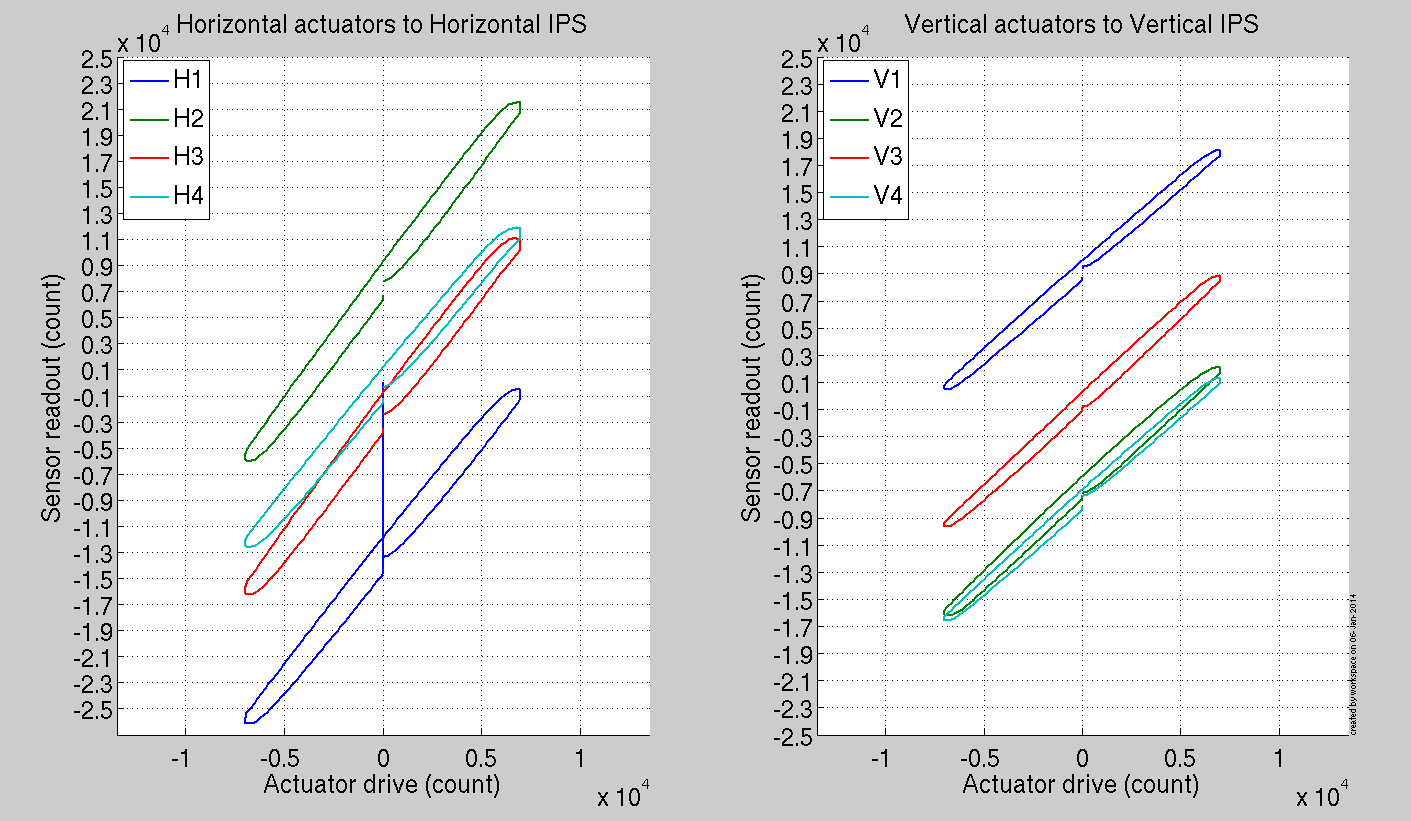
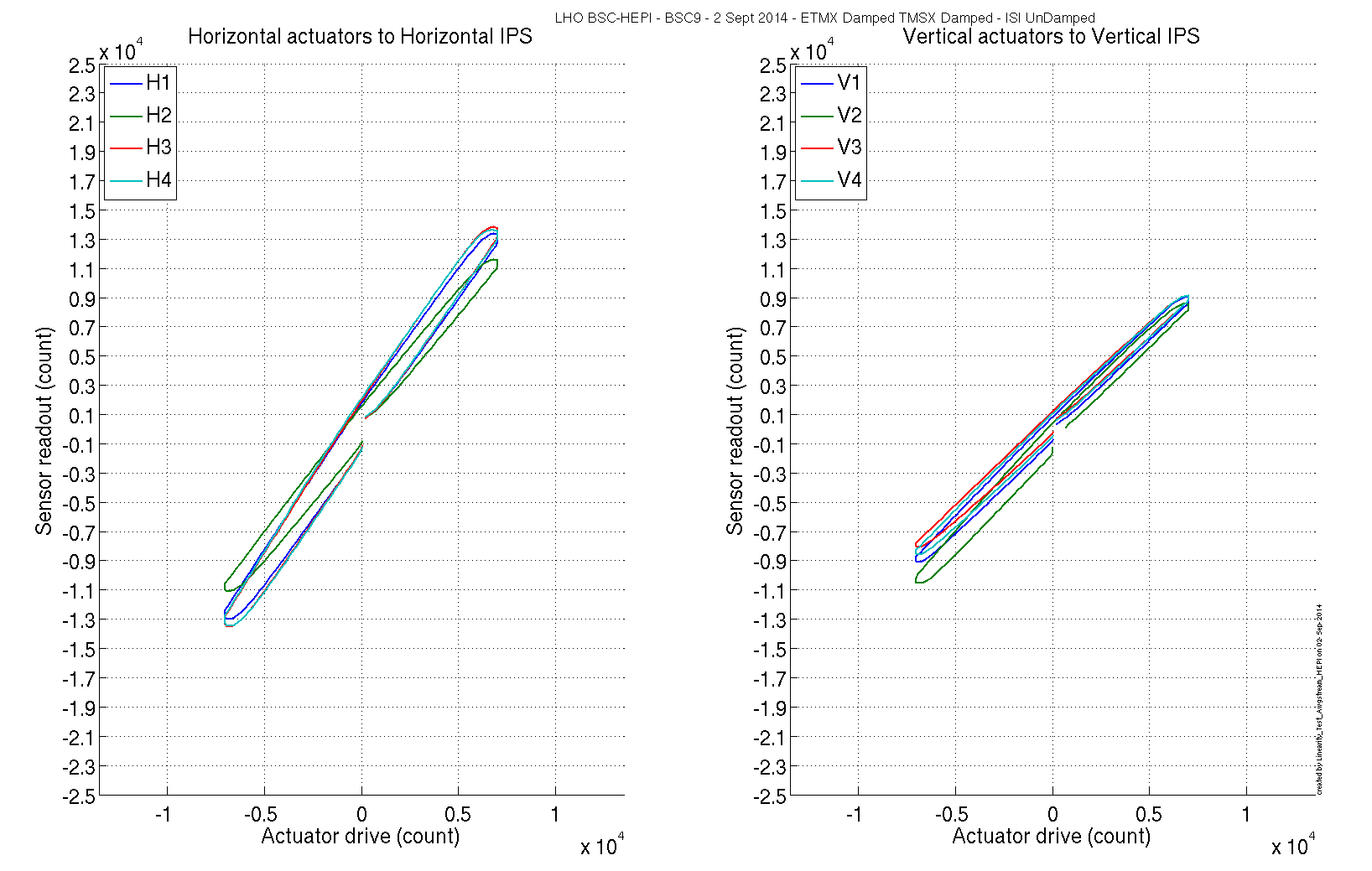
Back to the IPS zeroing, the mechanical stops on the HEPI Actuators (not adjustable) were mostly compatable with the IPS zeroing. ROM was 1.0mm for all Actuators except H2+, H4+ & V1+; H2+ & V1+ managed 0.9mm, and H4+ made 0.8mm. Linearity test results are attached; Jan results in first plot, today's in second. The new valve does seem to have less umph (from a new batch hot from LLO calibration) dropping a little less than 20% compared to the . Still, the position loops close and are stable. I have some other evaluations to do and will update.
safe.snap updated for ETMX HEPI.