jeffrey.kissel@LIGO.ORG - posted 16:30, Monday 08 September 2014 - last comment - 11:58, Tuesday 09 September 2014(13817)
BRS Tuneup
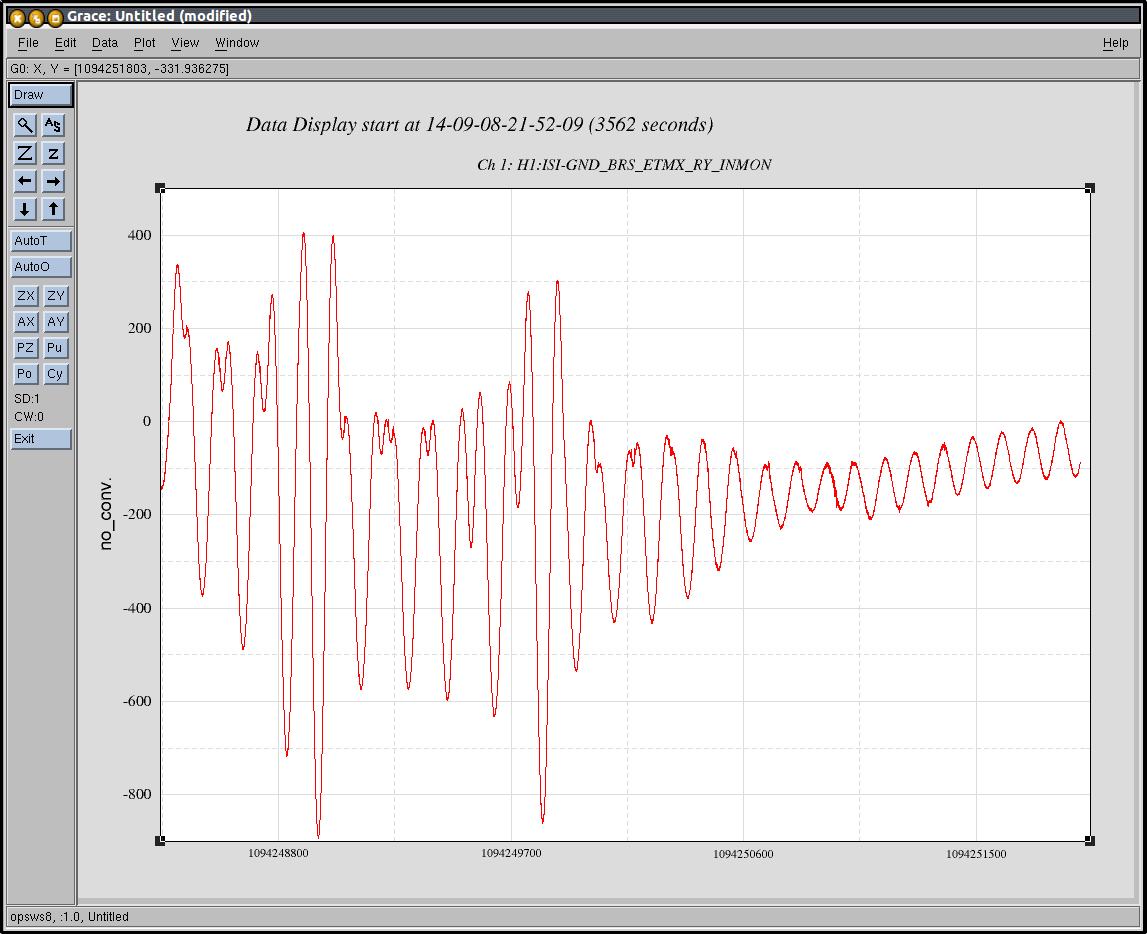
J. Kissel, S. Sachdev, K. Venkateswara Krishna discovered that the Beam Rotation Sensor software had stopped outputting data around Sep 4, Thursday, night ~11:30 PM (~1093890000). Unclear why the software had failed, but it meant we had take a trip to the X-end to restart the software. Instructions to restart the software: (1) Head into computer users room, and wake the windows laptop sitting on the shelf ~1m up in the last rack on the left. (2) Note the "rate" number in the upper left corner -- this is actually the DC value to which the BRS has drifted. (3) Close the running analysis screen, by exiting out of the window (the red x in the upper right corner). This stops the software. (4) Find (ctrl+F) the line in the code with the comment "DC subtract here," and change the value that's subtracted from "refLP[2]" to the "rate." Subtracting off the DC component of the signal helps reduce the impulse sent to the 1 [mHz] high-pass filter, therefore reducing the ring-down time upon start-up. (5) Save the updated code (ctrl+S). (6) Restart the software by hitting the "|> Start" button in the top-middle. (7) Check that you now see reasonable rotation sensor signals in the raw ADC channel, H1:ISI_GND_BRS_ETMX_RY_INMON. The DC value we subtracted was 1227 [ct]. The second attachment is pictures of the screen for steps 4&5 then 2&3. In addition, I was showing Surabhi around the PCal components, so we rung up the BRS. So we spent ~30 minutes damping the suspension with our mass. This was only my second shot at this flying solo, so it took a little while to remember how massive I am. Instructions supplementing the notes from LHO aLOG 13538, To damp: - Open up a StripTool watching H1:ISI_GND_BRS_ETMX_RY_INMON close enough to the BRS that you can see it, but still an appreciable distance away (I plug the workstation into the wall socket on the West side of the BSC9, and push it as far North as I can). - When the tilt signal is just after the maximum on the upper-half of its sign wave, stand close to the North (+X) side. - The tilt signal is influenced artificially by the 1 [mHz] high-pass filter, which causes the signal to turn up deceivingly fast as one stands near the BRS -- don't wait until the trough to step away from the BRS. - As the resonance gets damped, you need to stand near for less and less time - +/- 500 [ct] amplitude = need to stand on one side for a full half cycle (~30-50 seconds), +/-50 [ct] amplitude = only a few seconds at a time - +/- 25 counts is good enough. - Once the tilt signal is at +/- 50 [ct], I (at ~180 [lbs], or ~80 [kg]) need only stand as close as the Southwest HEPI pier for 5-10 seconds to create the right amount of damping force. First attachment is a time series of our trial and error attempts at figuring out the above procedure.
Images attached to this report
Non-image files attached to this report

Comments related to this report
Jeff said that there were no error messages on the laptop screen, which indicates that it was a failure of the CCD camera. This mostly happens because of grounding issues in my experience. The CCD is grounded through the USB hub powered by an extension cord in the VEA and the laptop is powered off the rack power supply in the computer room. If there was a small voltage spike between these two different grounds - which can happen when high power devices are turned on/off, that might have caused the CCD camera to fail. The system worked for ~13 days without failing, so hopefully this problem will not be very frequent.