After a looooong struggle with the filters, I finally managed to have some sensor correction on HAM2-ISI.
I've installed a FIR filter and its companions (LP&AA, Blend with IIR) in the FIR path, and a High Pass Blend in the IIR path of X and Y (for more information on those filters, see DCC #T1200285).
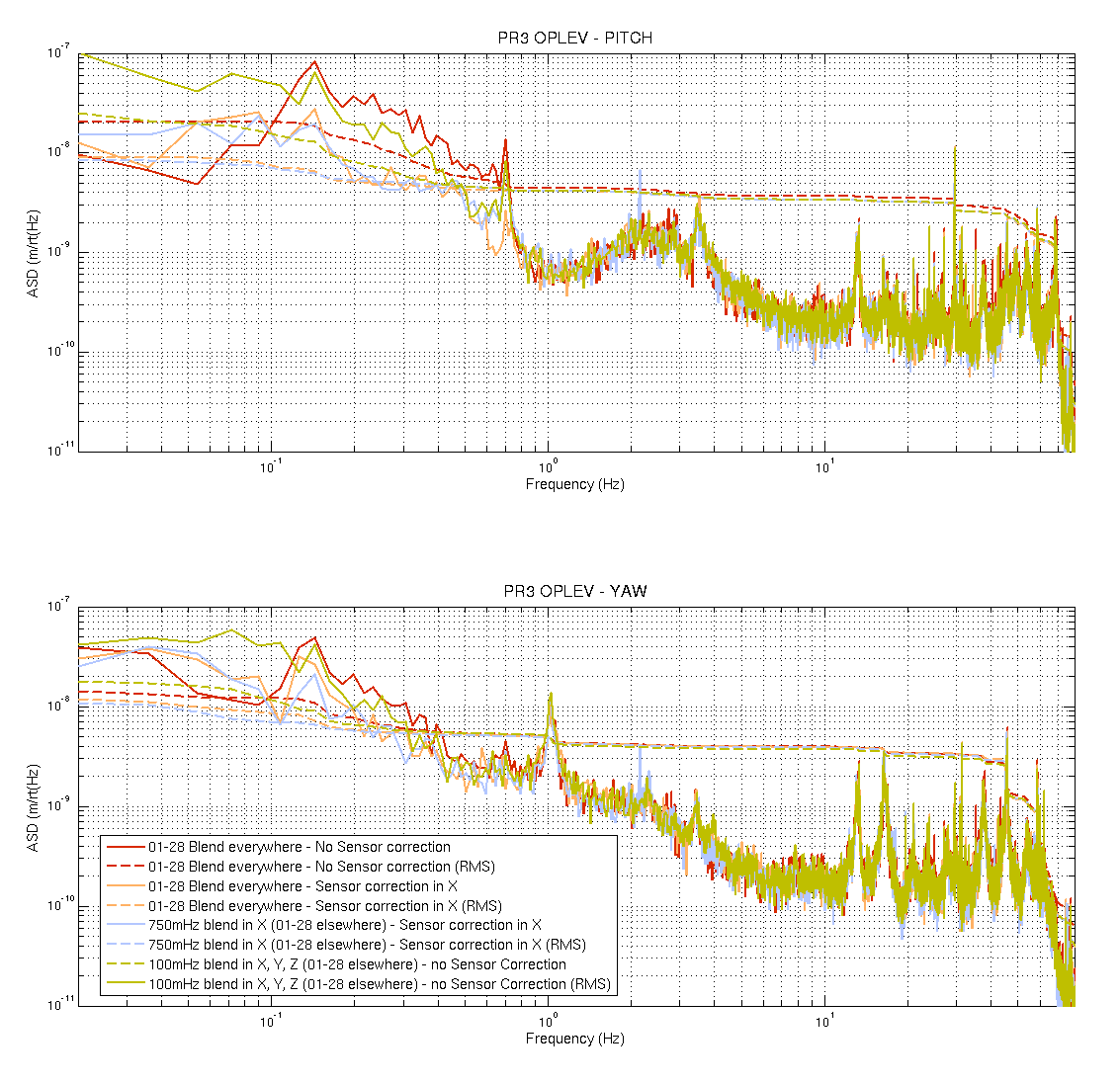
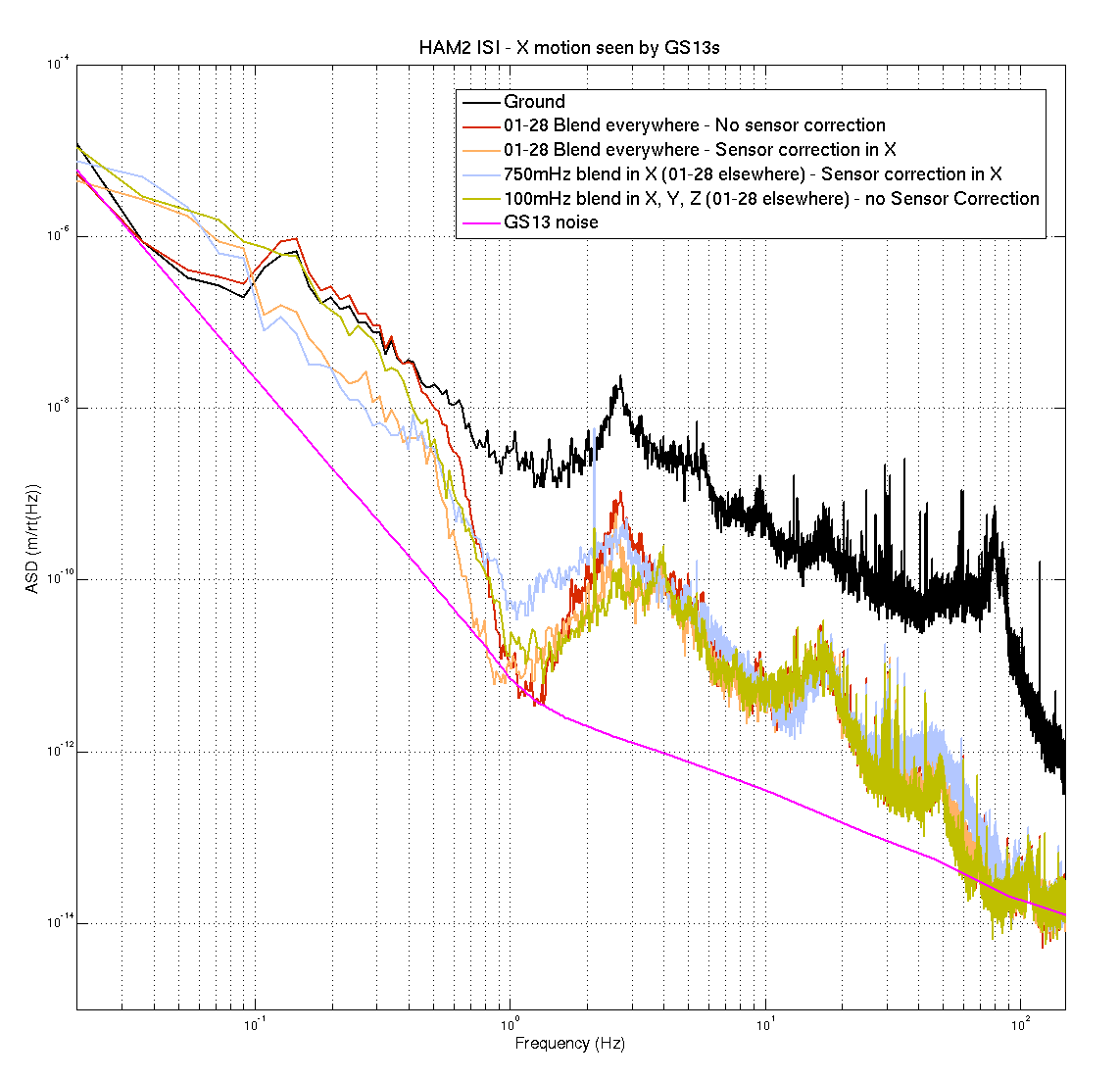
The following plots show the performance with sensor correction on X only. For some reason, I had to tune the gain to -10 to obtain some noticeable improvements.
- The red curve shows the nominal configuration. This config is wanted nominal because it provides good performance above the microseism without reinjecting noise at lower frequencies.
- When we turn on the sensor correction (orange-ish curve), we can see some improvement at the microseism and in the integrated RMS of the OPLEV (factor of ~3). BUT, as a tradeoff, we are reinjecting some noise below (the coherence between the GS13s and the ground STS is dropping below 100mHz).
- Switching to a higher blend doesn't seem to help the sensor correction (blue-ish curve)
- Even if the 100mHz blend is helping at the 0.7Hz resonance, it reinjects a lot of noise at low frequency (green-ish curve). We might not want to use that configuration.
By looking at the optical lever, those preliminary results are encouraging. But we have to be careful: even if the absolute motion is reduce, it doesn't say anything about the relative motion in the cavity. The next step will be to look into that.
-> The idea will be to implement some sensor correction on HAM2 and HAM3 using the same ground sensor. Driving the chamber with the same input signal should limit the relative motion in the cavity.
Commissioners were playing with PRCL today, I'll have a look into that ASAP.