Alexa, Sheila, Gabriele
We closed the servo loops for the relf wfs IR y-arm centering. The error signals are fed back to the test masses as follows:
| Pitch Error Sig | Pitch Gain | Yaw Error Sig | Yaw Gain | Filter Bank | |
| ETMY | RELF_B_RF9_I | -0.001 | RELF_B_RF9_I | 0.005 | DHARD |
| ITMY | REFL_A_RF9_I | -0.001 | REFL_A_RF9_I | -0.003 | DSOFT |
The DC centering must be on; these were unchanged. I have also taken a screen shot just in case (the input/output matrices are the same for pitch and yaw).

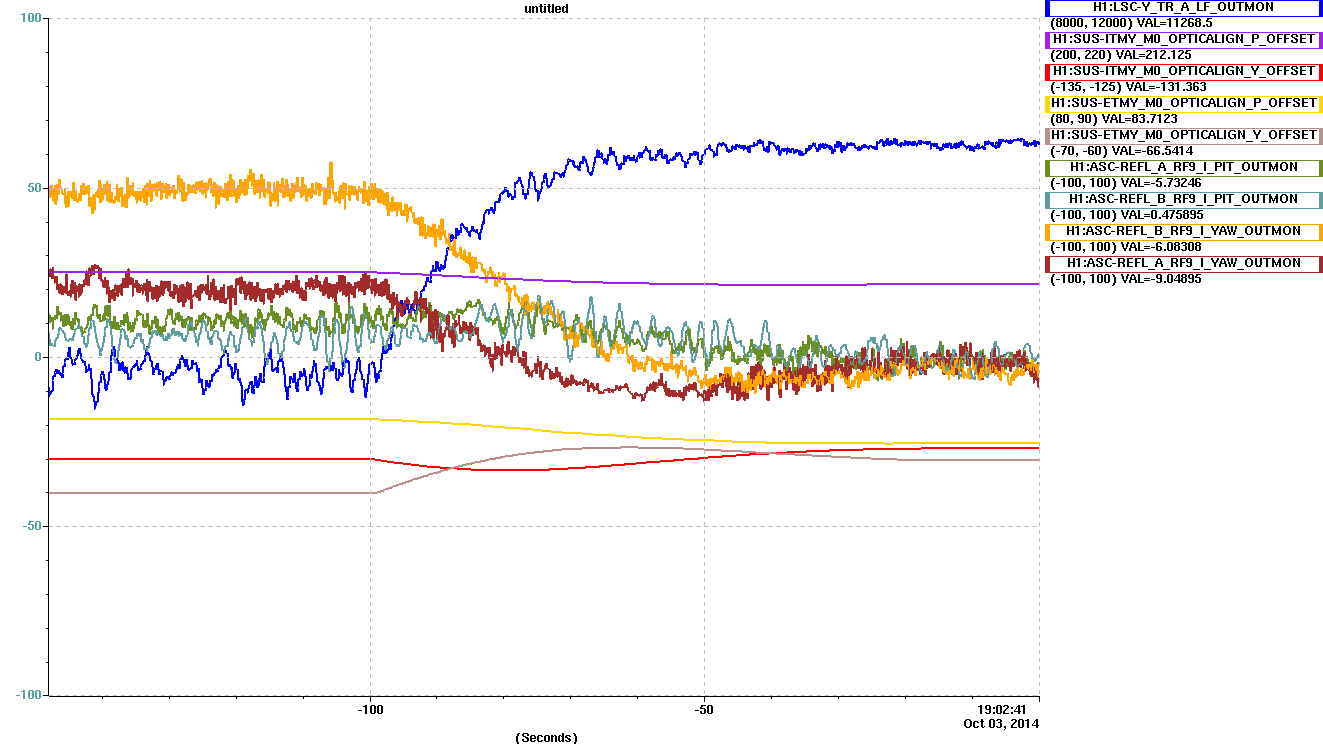
I wrote a python script that implements the same angular loops, but actuating directly on the alignment offsets. In this way it is not necessary to offload the servo output at the end of the alignment. The loops operates only if the arm transmitted power is above a threshold. They continue to operate as long as the error signals are larger than another threshold value. The check on the error signal is perfomed with a running average, to smooth their noise. All parameters are set at the beginning of the script.
As shown in the attached figure, the loops are working well. Maybe the gains are still a bit low.
To ease the implementation of this alignment techniques into the guardians, I'm not using anymore the threaded trigservo loops as at Livingston, since it was not clear to me how to terminate the threads from inside the guardian. Now everything is local to the main thread. The script is attached. It should be easily configurable to any other configuration and number of degrees of freedom