krishna.venkateswara@LIGO.ORG - posted 15:47, Friday 10 October 2014 - last comment - 16:32, Friday 10 October 2014(14408)
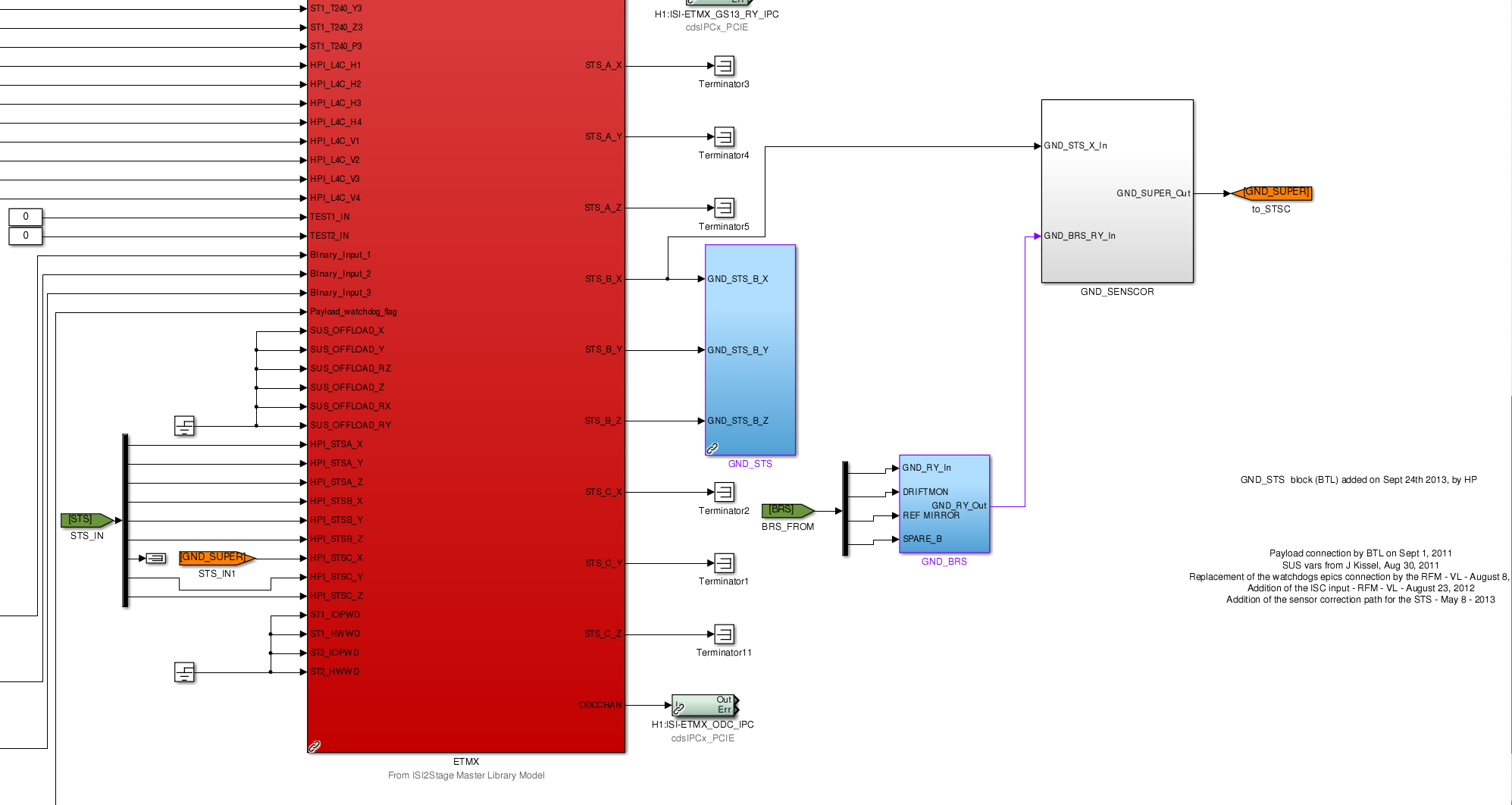
H1 ETMX Ground sensor correction model
J. Kissel, K. Venkatewara
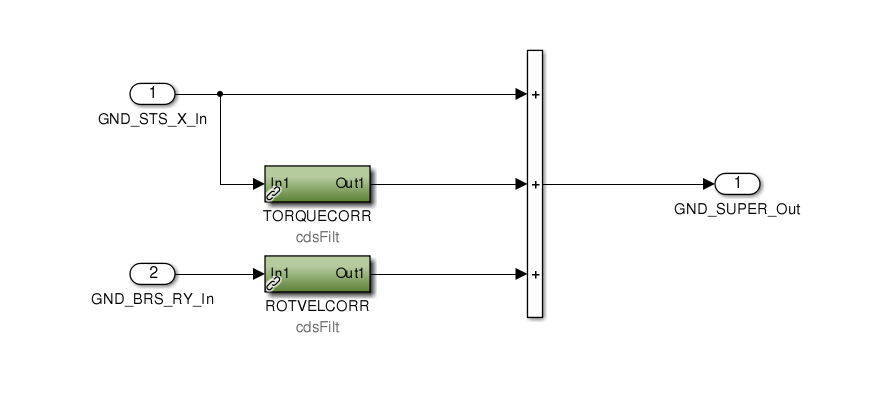
Jeff K. designed a model to use the GND_Supersensor (tilt-corrected STS) to do sensor correction on Stage 1.
To get the supersensor, we take the GND_STS and add the Tilt signal from BRS converted to velocity units by multiplying g/w. To further correct for the small amount of acceleration present in BRS, we further add a factor of F * V_STS * g/w^2 where F = M * d / I (M=Mass of beam-balance, d = Center of mass offset, I = Moment of Inertia)
Jim and I will try to implement and test this next week when not interefering with commissioning activity.
Images attached to this report
Comments related to this report
J. Kissel A reminder to add the damping control signal monitor (currently fed into ADC0 CH 30, see D1400077, as of LHO aLOG 14351) to the h1isietmx model's channel list. In fact, it's already included and sent into a filter bank called "ETMX_SPARE" in the GND_BRS block, so let's just change it from a filter bank to an epics output (like the drift monitor) and call it "ETMX_DAMPCTRLMON." Once added to the front end, we should add it to the MEDM screen.