See the attached for some manipulated data.
There are now pressure signals coming from the End Station VEAs just before the BSCs fluid distribution manifolds. So the pressure before the actuators and the pressure just after the actuators (before and after the distribution manifolds.) See the first attachment--you can see that there is some 6psi pressure drop from the last transducer on the Pump Station Manifold to the Transducer just before the supply distribution manifold at the chamber. This is a distance of some 80 or 90 feet of 1" tube.
The idea is that the Actuators are meant to operate at a consistent pressure drop and having the sensors in the area of operation and where we have tighter temperature regulation would be a better thing. While these epics channels can be conditioned (smoothed, averaged,...) the second attachment shows how much noisier these raw signals would be to produce the differential pressure signal for the servo. I've subtracted the Return Pressure from the Supply to get the Differential; the vertical scales are the same for the two EX signals,and the same for the two EY signals. All plots are in PSI.
Why are they so much noisier? Let me see, maybe the 80 or 90 feet of cable? We do have an at chamber active signal amplifier, don't know the DCC off hand but later.
Anyway, I may be a little reluctant to switch HEPI to these signals. I don't think any one has complained about HEPI because we are running on the direct supply pressure rather than the differential.
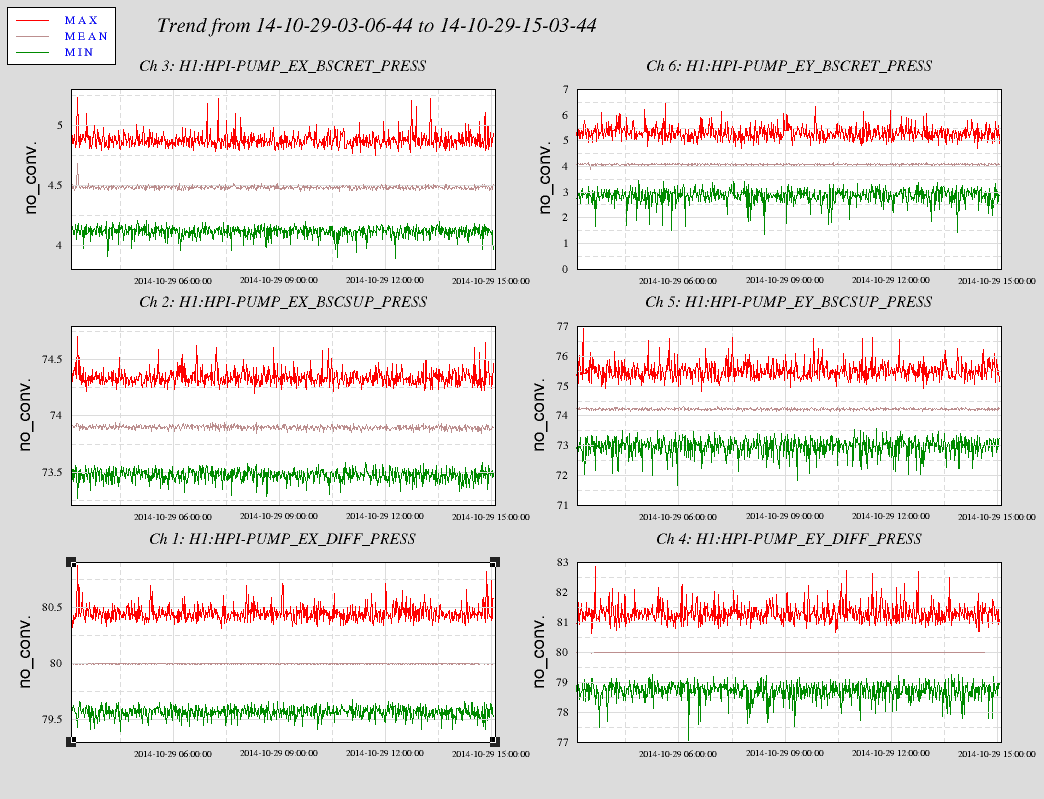
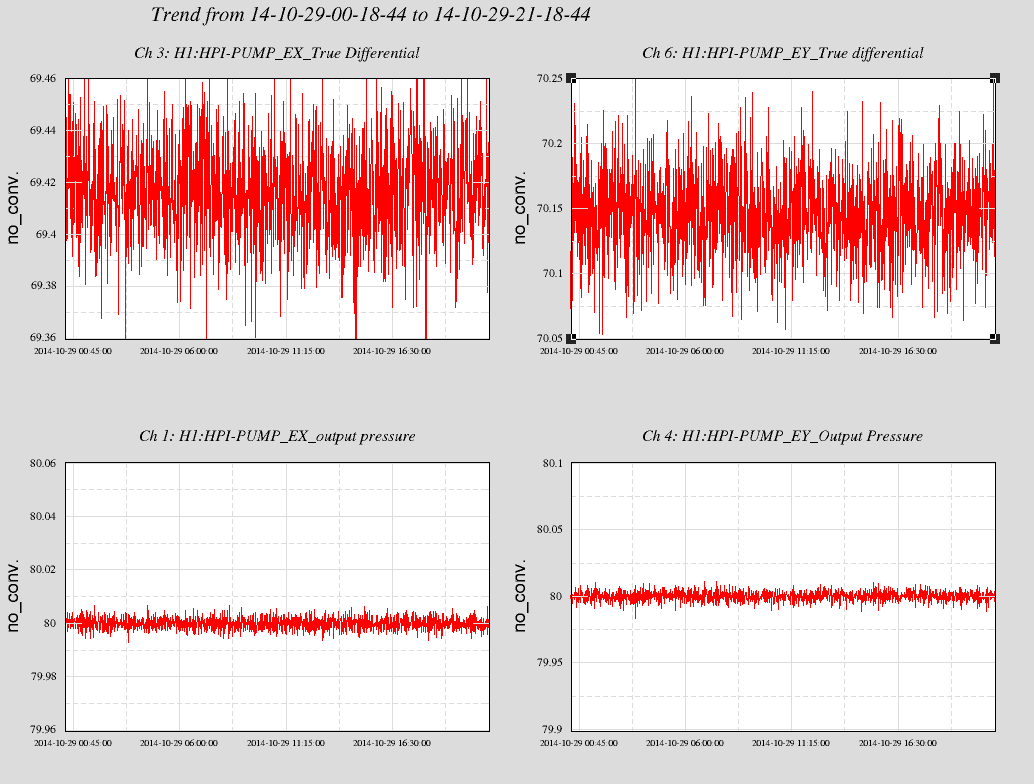
As RichM pointed out to me, in the second plot, the lower traces of Output Pressure are in loop and the True Differential plotted above are out of loop. I would expect these situations to reverse whence the servo switches to the latter. Additioinally, the first plot which has the max & mins, show the overall noise on the three channels are really the same at the stations; there is certainly more noise on the EY sensors by something like a factor of 2. But you can see how much quieter the mean is on the servo'd channel.
So, I don't think there is sensor noise issue here to worry about.