Chris, Evan
We have implemented pitch damping by feeding the SR3 oplev back onto M2.
We used the HLTS model susPR3model.mat in NbSVN/aligonoisebudget/trunk/DRMI/L1/TransferFunctions to get a simplified, two-resonance model of the M2 pitch →M3 pitch plant:
- First resonance: f0 = 0.8 Hz, Q = 125
- Second resonance: f0 = 3.6 Hz, Q = 251
- (Also a small resonant wiggle aroung 0.6 Hz, but it doesn't seem to be so important.)
Then we added the following filters to foton:
-
zpk([0],[100],1,"n") -
zpk([],[50;50;50],1,"n") -
zpk([0.045+i*3.6;0.045-i*3.6],[],1,"n") -
zpk([0.03;0.7],[0.141421+i*0.141421;0.141421-i*0.141421],1,"n")gain(0.525002) -
ellip("LowPass",4,2,40,15)
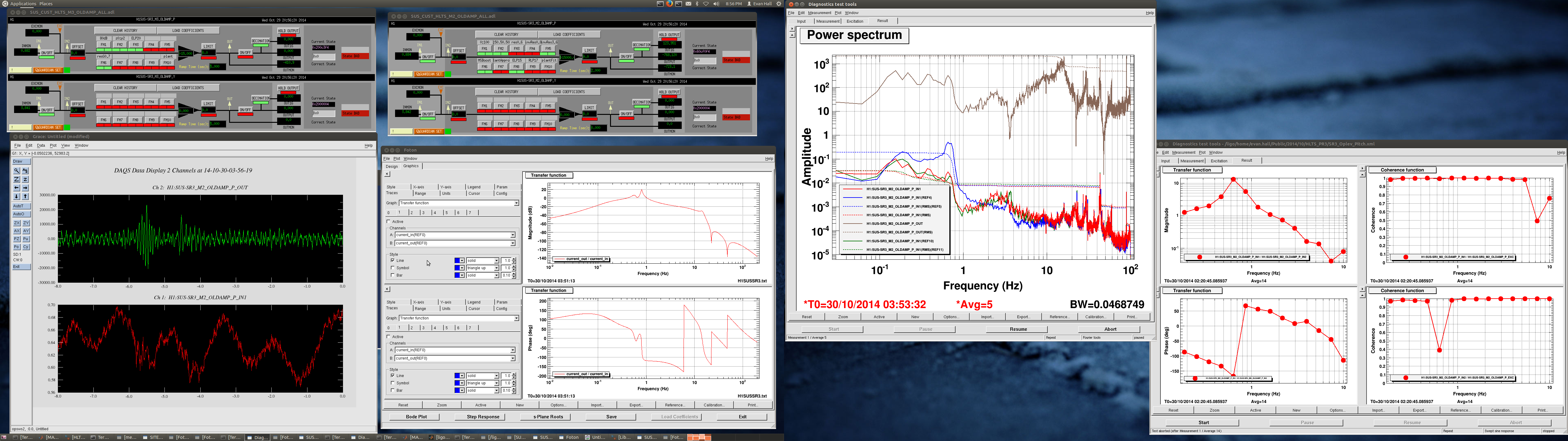
In the attached screenshot, you can see the expected OLTF (in foton) and the measured OLTF (in DTT).
Also in the attached screenshot, you can also see some spectra. Blue is no damping, Green is the existing M3 damping, and red is the new M2 damping. Brown is the control signal for the M2 damping. Evidently, amount of suppression is about the same for the two loops.
We suspect that the bump at 2.5 Hz or so (not to be confused with the suspension resonance at 3.6 Hz) is gain peaking in the loop. Some more optimization may be necessary. Additionally, we need to consider how much noise is being injected into the motion of PR3. We tried for a little while, but realized that (a) we need to get the calibration from counts to newton-meters in order to make sense of the control spectrum, and (b) we haven't yet formulated a noise requirement that the oplev loop must meet.
Also, Suresh has pointed out that the PR3 oplev probably needs recentering; it is at 17 urad in pitch, and the optic's angle fluctuation is showing up in the oplev sum power. This is why we closed the loop on SR3 (recently recentered) rather than PR3.