Jeff & Hugh
I attempted to correct the Local <--> Cartesian matrices and load generic HEPI controllers for the position loops. Long story short, lots of watch dog trips, open loop TFs. Plant must have changed...actually, routine error in the Matlab process of controller development was giving different matrices (not the correct ones) to the controller calculator. So to the calculator the plant was different than what the new matrices were giving the controllers. Hence instability.
I reverted the foton file and burt restored to 0510pst. It isolated first time. But why does it look like the alignment changed? ISI servos back all dofs to the reference location but HEPI only restores the RZ reference location. So how do we get an apparent yaw, based on PR3 alignment etc? Maybe the other dofs that are servo'd but not restored to the reference cross couple into yaw? Maybe...
But, we are servoing in the cartesian basis, what is happening in the local basis? Remember, HEPI has four horizontal actuators and can distort or pringle the platform. So, even though we servo the RZ back to 'zero', what are the four corners of the HEPI platform doing?
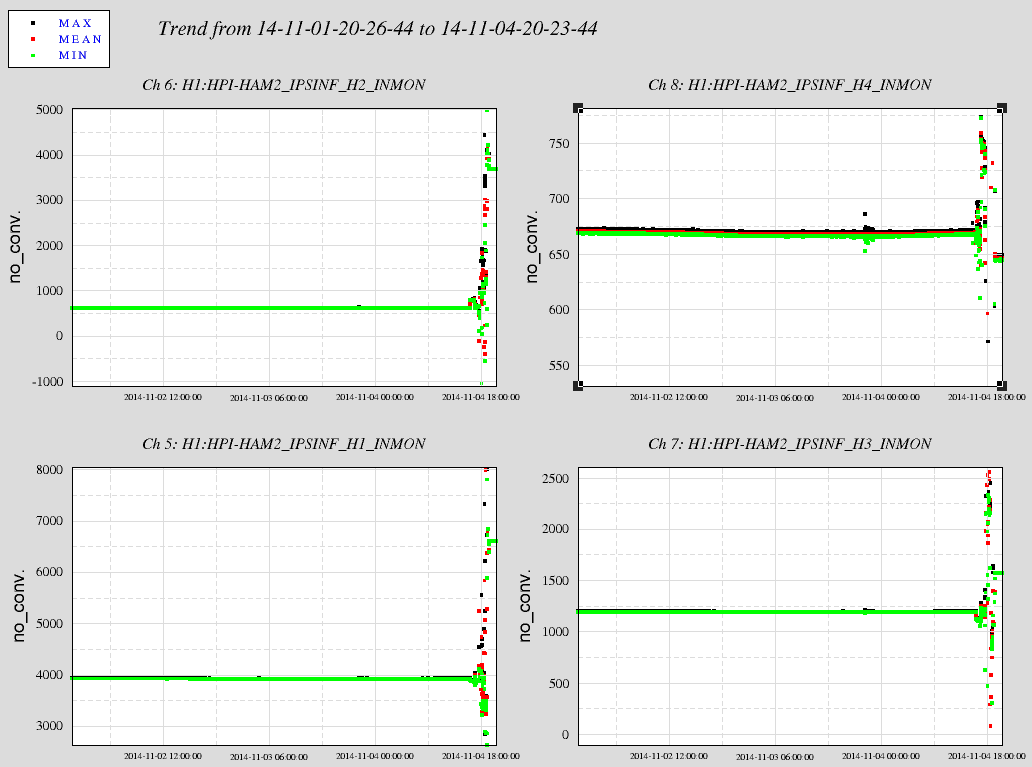
Based on the raw IPS counts(see first attachment with 3 days of the horizontal IPS trends) the platform yaws 1.6urads, this is using the correct matrices. What I don't understand is that with just sign errors in the rotational dofs, why isn't this still zero? The system has servo'd the RZ back to its reference of 20905nrads. Are there multiple minima in the local IPS space to satisfy the cartesian servos? When I do the same exercize using the current (incorrect matrices,) I get a yaw of 470nrads. It should be zero but maybe this is within the error of my picking values from the data viewer trends. When Jeff and I do a similar exercise using the changes in the output drives to the Actuators, we get 300nrads. To do this we just looked at E1300828 and used the H1's displacement from 5000cts drive as the calibration. This may not be valid for all actuators and again picking before and after data points from the data viewer trends certainly has slop.
So, even though the cartesian RZ has servo'd back to its place, the individual corners of the HEPI are not in the same place implying disortion. Is this distortion enough to impact the Optics' pointing?