Okay, recall: WHAMs 2 & 3 HEPI had incorrect signs for the three rotational dofs on the Input matrices. The output matrix, converting the cartesian drives from the control loops to the local actuator basis also had incorrect signs on the rot dofs but there were also screwy magnitudes with errors from 25% to 8x so all over the map. While all the dofs run closed loop, having the output matrices correct will ease the burden on the loops and better enable open loop running. It may also reduce unneeded strain cycling. Remember, I have lots of opinions!
Anyway, unlike last week when the matlab script was using incorrect matrices for my controller development(obviously unbeknownst to me) and the switch I attempted was a spectacular failure, this time, turning the loops back on with correct matrices and new controllers was anticlimatic. No problem turning things on, no trips, and the ISI remained isolated. The most notable thing is that I learned
The HAM2 ISI OpLev Pitch and Yaw are Reversed.
I'll suspect HAM3 is similar.
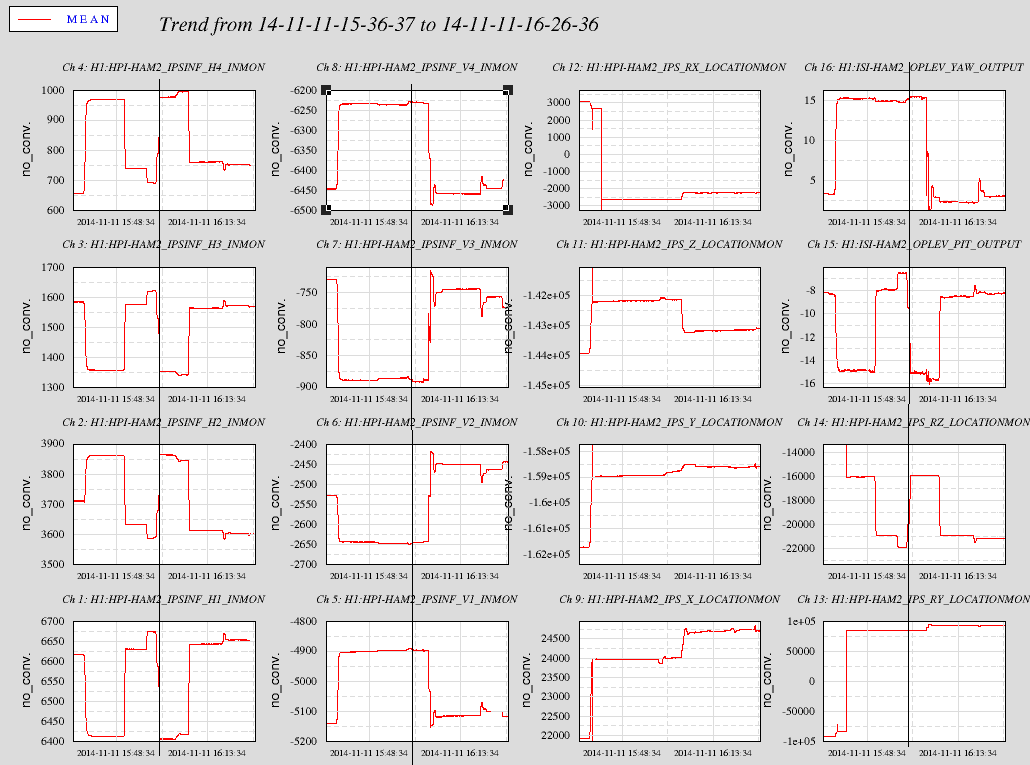
See the attached for 50 minutes of trends with chans 1-8 being the HEPI Local Sensors, chans 9-14 being the HEPI Cartesian Locations, and the last two are the OpLev Pitch & Yaw. Notice the right most vertical line I've drawn through the RZ steps as I'm trying to drive the OpLev 'Yaw' back to whense it came. Of course you'll see that the Yaw doesn't move and the Oplev Pitch does. Of course you say, "Hugh, why do you think your RZ channel is better than the OpLev channel?" Well, notice too the other vertical lines positioned at the same time through the HEPI Local Sensors. You should notice the at the RZ move is seen by the local horizontal channels and the vertical channels see nothing. Okay, I know that is circular...just take my word huh. We can do some physical sensor disconnects or something if you insist.
I did tweek the ultimate RZ Reference location to recover the OpLev actual Yaw of ~-8.2 units but the change was <200nrads. I tweeked in the Pitch too but after taking the system down and back up with Guardian, the Pitch and Yaw numbers on the OpLev are changed, slightly. We didn't have the mode Cleaner while I made this change but it relocked as soon as the LASER was back on. The Beams on the AS AIR camera view are up in the upper right though, I don't know but that may be different.
The commissioners shoudl feel free to steer HEPI as they wish.
Finally, I may suggest a guardian change that isolates and steers the DOFs we want to restore and then get the steered free hanging position and isolate the remaining dofs. Certainly you can see how that wold reduce the strains and possibly provide more repeatable position recovery.
A new safe .snap and the updated foton file has been commited for the HEPI.