Summary:
There are some strange things, but in summary,
WFSA is more sensitive to the hard mode (arm axis rotation at around the center of the arm) than the soft (arm axis translation).
WFSB's sensitivity to the hard mode is smaller than WFSA by a factor of 5 or so. Also, WFSB is somewhat more sensitive to the soft than WFSA.
This means that we can use WFSB as the soft mode sensor and feed back to TMSX (because TMS causes the soft and the hard mode with comparable normalized amplitude at the same time), while using WFSA as the hard mode sensor to feed back to e.g. ITMX. Then we can use the ITMX camera image to slowly feed back to the ETMX to fix the beam position on ITMX. Or you can do fancier diagonalization but you get the idea.
Details:
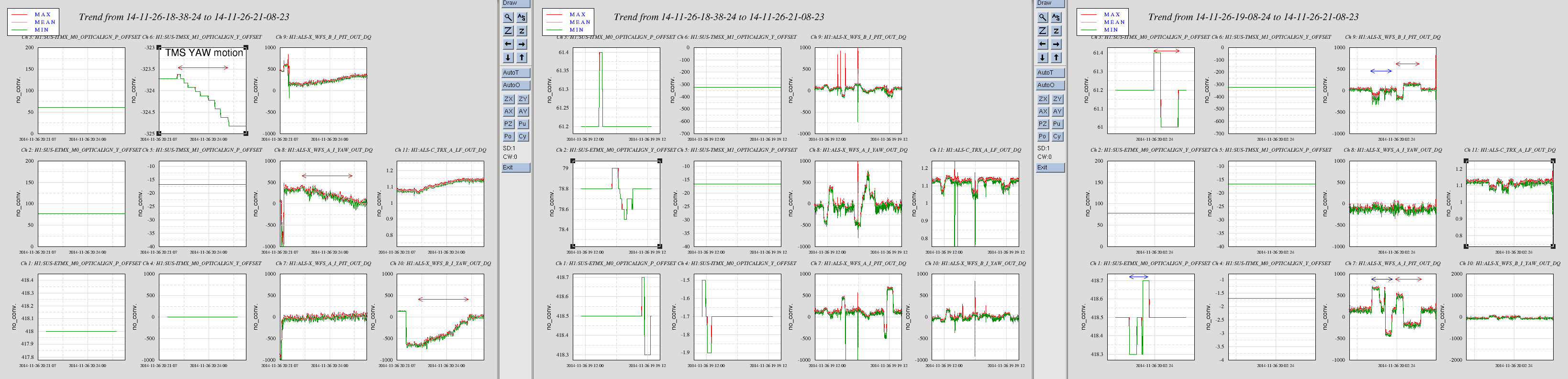
In the attached, the right most plot shows the response of WFSA and WFSB against EX and IX PIT motion.
You can see that WFSA's response is much larger than WFSB. You also see that WFSA only goes down when you tilt EX, but that's not the case for IX (why?).
The middle plot shows you both PIT and YAW response. Again WFSA is much more sensitive than WFSB.
The left plot is the response against TMS in YAW (didn't have time to do PIT), and you see that the WFSB response is about twice as large as WFSA.
Both ETM and ITM causes mostly the hard mode motion because the cavity is close to concentric.
OTOH TMS causes both the hard and the soft mode motion at the same time.
So, all in all, these appear to mean that WFSA is more or less the hard mode sensor, and WFSB is the soft one.