stefan.ballmer@LIGO.ORG - posted 16:39, Saturday 13 December 2014 - last comment - 14:13, Monday 15 December 2014(15599)
Full Green WFS on both arms: a little more bandwith
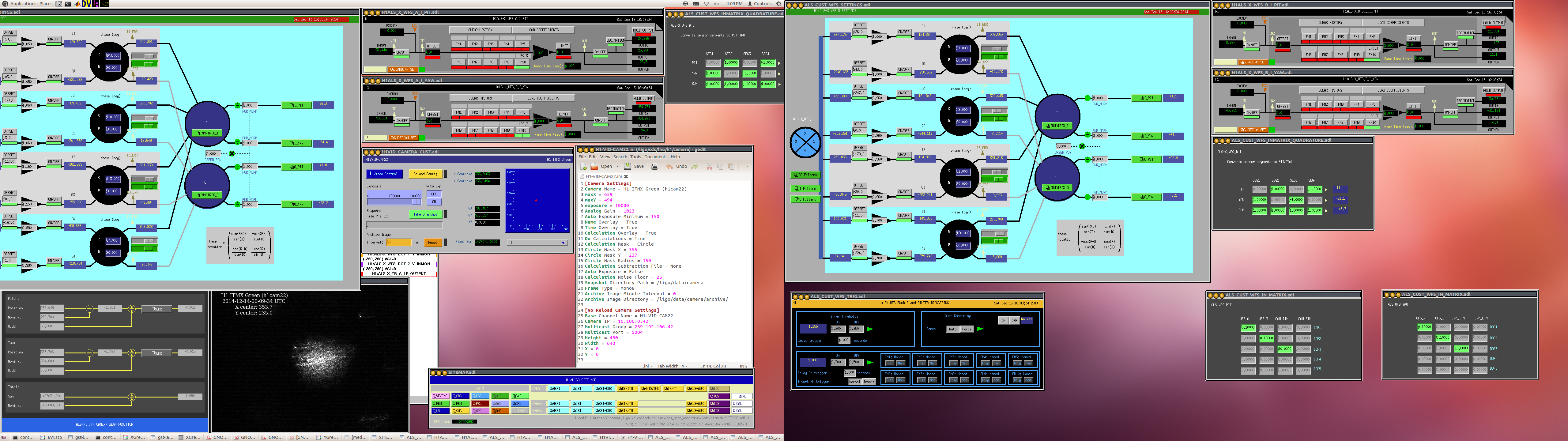
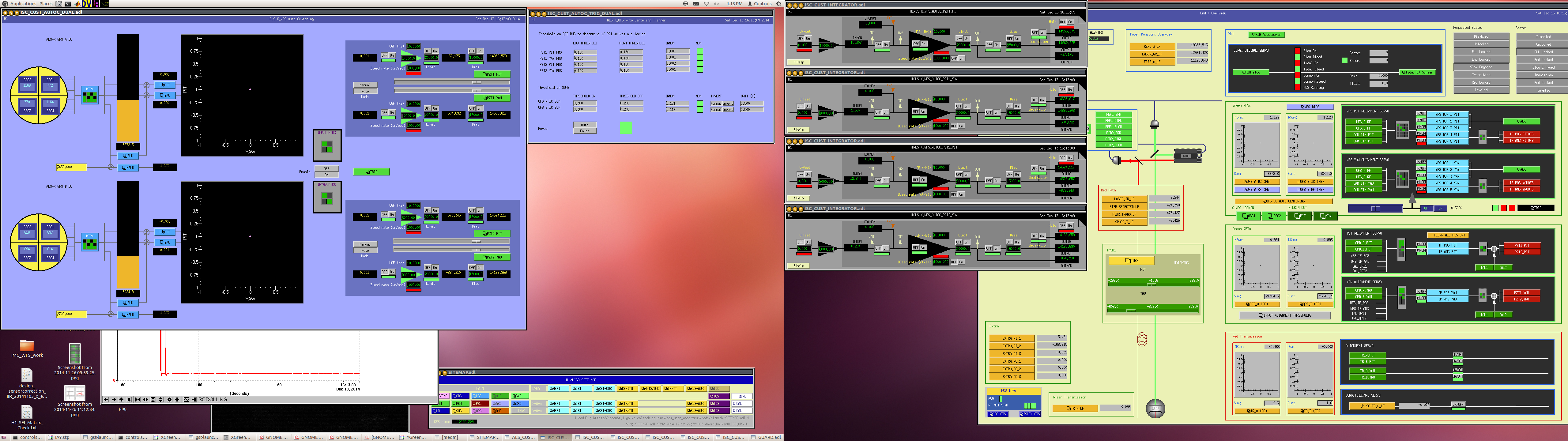
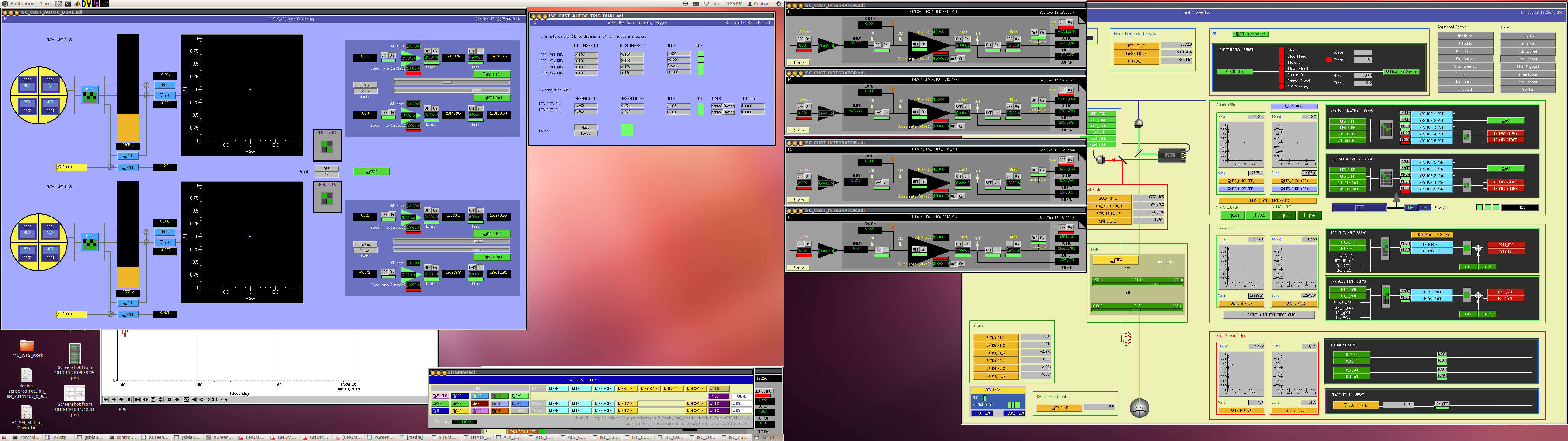
Evan, Stefan Did some more WFS/camera loop work on both arms: - Added a 0.3Hz LP with a notch at the main pendulum modes into the WFS output filter modules. This allows for a ~3-5 times higher gain. - Carefully measured the output matrix for the camera loops (X and Y arm, yaw and pitch) by dragging the ETM around and letting the WFS follow. The new output matrix values are in the snaphots #3 below. With them the camera loop no longer relies on gain hierarchy - it's gain was increased ~x10. - Some gains were redistributed - see the attached snaps. - Cleaned up the arm Guardian. Removed all old slow feed-back stages, and instead added a state commanding Daniel's new setup. - Added a WFS relief step to the Guardian.
Images attached to this report



Comments related to this report
We noticed that the higher Camera gain can cause a too big kick during the WF engaging process. Thus we used the existing FM triggering to set up a 10 second delay. During those 10 seconds the DoF3 (P&Y) , i.e. the camera loops, have 20 times lower gain. This seems to take care of the engaging problem. The attached snapshot contains all elements that changed.
Images attached to this comment

The experimentally measured output matrix to move TMS, ETM and ITM simultaneously to center the ITMX green camera (without misaligning the beam) is
X PIT: X YAW:
ITMX: 0.68 -0.43
ETMX: 1.00 1.00
TMSX: 1.43 1.00
Y PIT: Y YAW:
ITMY: 1.43 -1.23
ETMY: 1.00 1.00
TMSY: 1.54 1.15
The expected matrix would be
PIT:
ITM: 1.06 = -g1
ETM: 1.00
TMS: 1.00
YAW:
ITM: -1.06 = g1
ETM: 1.00
TMS: 1.00
This means that our angular actuation calibration is somewhat fishy...
For reference, the H1 installed optics radius of curvature are (from https://galaxy.ligo.caltech.edu/optics/, after coating measurements):
ETMX: ETM-08: RoC=2242m ± 2m, (LIGO-C1103233), g2= -0.7817
ITMX: ITM-03: RoC=1940m, (LIGO-C1103237), g1= -1.0590
X Arm length: L=3994.4704 m ± .3mm (alog 9626)
ETMY: ETM-12: RoC=2240 ± 2mm, (LIGO-C1103257), g2= -0.7832
ITMY: ITM-11: RoC=1939.4m, (LIGO-C1103255), g1= -1.0596
Y Arm length: L=3994.4691m ± .7mm (alog 11611)