Last night I tried a new loop topology for the OMC alignment servos, using the inputs to the OMC SUS that were added to the model a few weeks ago.
The idea here is to diagonalize the DC alignment in HAM6, using OM1 and OM2 for the centering on the AS WFS, and use OM3 and the OMC SUS for the centering into the OMC.
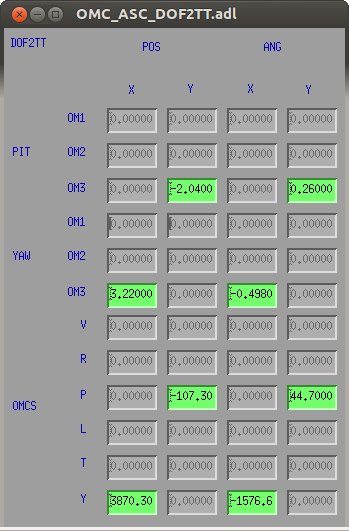
I measured the sensing matrix for OM3,OMCS {P,Y} --> OMC-ASC ANG,POS {X,Y}, took the inverse, and used this for the output matrix (DOF2TT). This kind of worked; I was able to close all four loops and engage the AS WFS DC centering in parallel. But the centering on the OMC wasn't very stable, and turning on the integrators caused an instability in the yaw loops. I think the problem is that we're using loops designed for the tip-tilts to actuate on a 2-stage suspension; a better approach is to invert the OMC SUS --> OMC QPD transfer function and put this into the OMCSUS ASC filter banks. But, my earlier fear that the OMCSUS actuation was too weak doesn't appear to be true. This scheme should work once we account for the complications in the OMC SUS transfer function.
A screenshot of the output matrix from ANG,POS --> OM3, OMCS is attached. You can see that the OMCS is 1000x weaker than the tip-tilt. For now I have reverted to the old configuration, which uses OM1 and OM2.
After I reverted back I noticed that the dither loops had developed an instability! They were stable as recently as 10 days ago, according to conlog nothing had changed. We'll need to investigate the dither alignment chain in the new year.