Summary:
I was able to close the ISS Second Loop few times this morning. The loop performance was on-par with what we achieved when we locked it last time. The picomotor closed to the ISS PD array was also moved to optimize the light on the ISS PDs and the QPD
Details:
Noticing that the ISS QPD pitch and yaw were off, I moved the picomotor closer to the ISS array to optimize the light on the PDs and the QPD. This work improved the light on half of the PDs by about 10-20% . This also improved the beam position on the QPD. Before and after readings are listed:
| Before (cts) | After(cts) | Before (cts) | After(cts) | ||
| PD1 | 4430 | 4460 | PD5 | 4600 | 5400 |
| PD2 | 4150 | 4900 | PD6 | 4700 | 5000 |
| PD3 | 4750 | 4800 | PD7 | 5750 | 5780 |
| PD4 | 5050 | 5300 | PD8 | 5300 | 5380 |
| Before | After | |
| QPD_PIT | 0.73 | 0.08 |
| QPD_YAW | 0.75 | 0.01 |
| QPD_SUM | 24400 | 24300 |
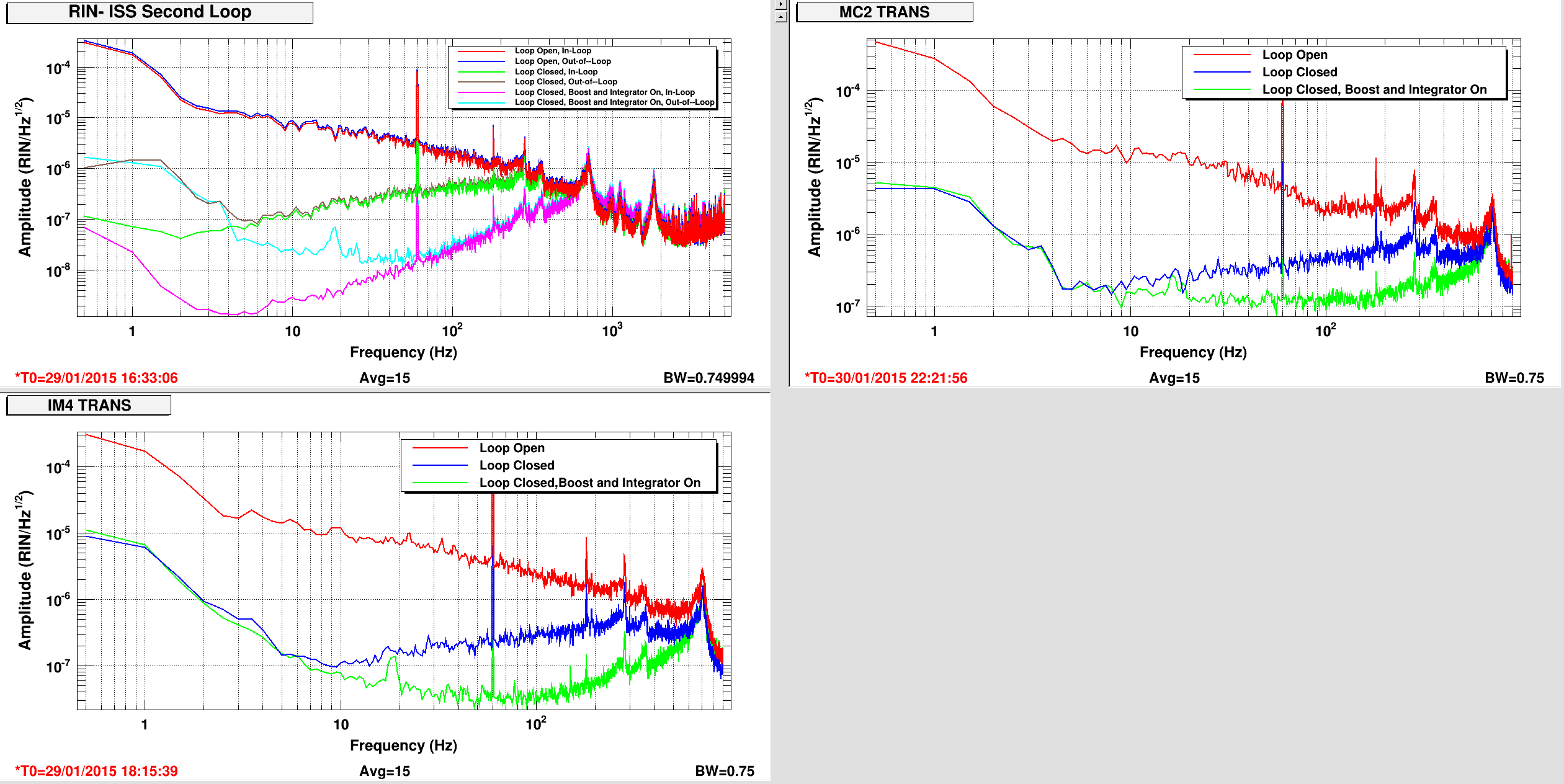
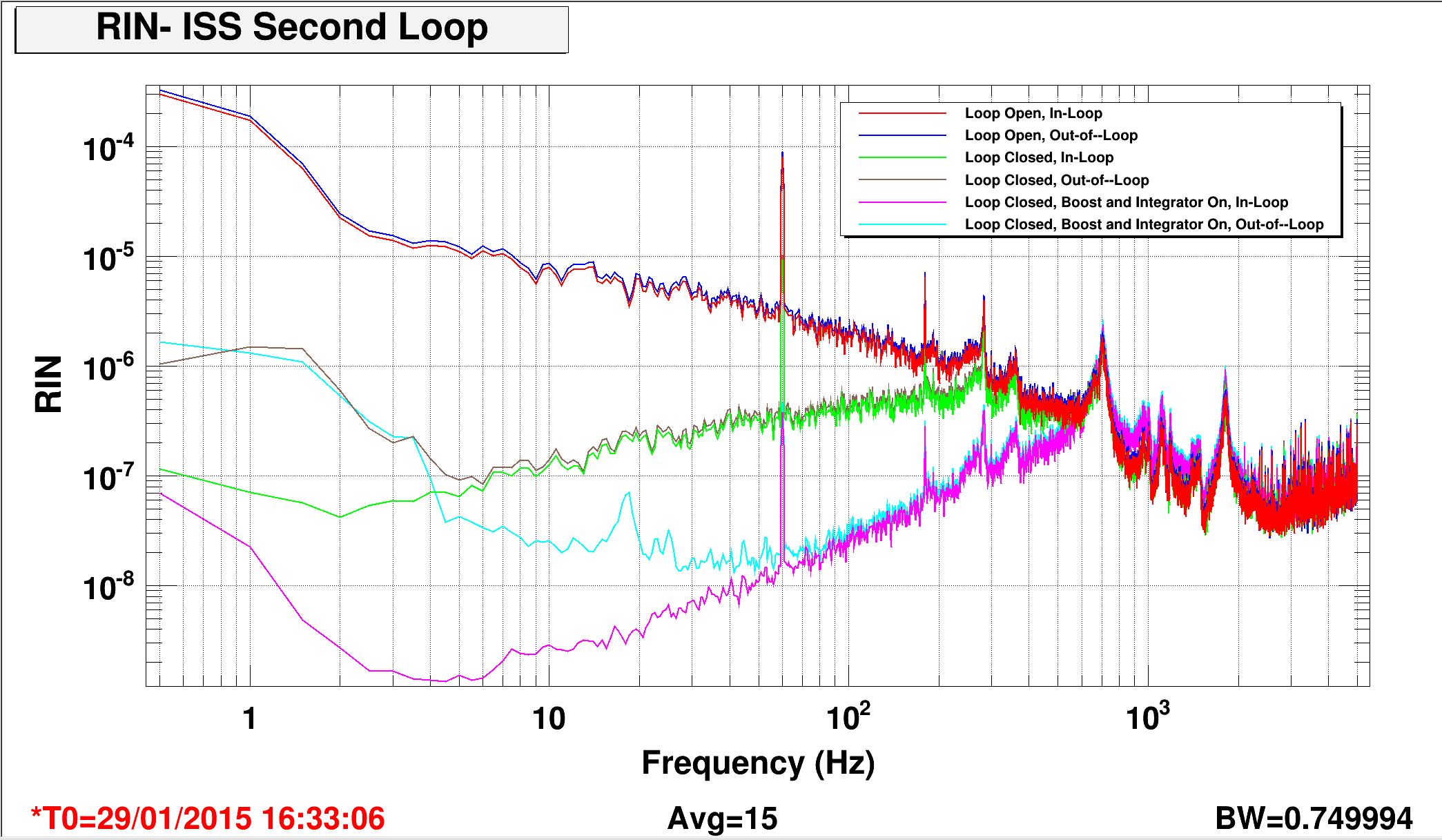
I was able to close the loop without kicking the IMC out of lock. This was not robust and the previously used script wouldnot work because the second loop output fluctuation was much bigger than that we used as threshold in the script. Rather changing the script, I would want to investigate why we are not able to obtain the same robustness that we previously had. The loop performance is on par with what we have achieved in the past. With the loop closed and boost and integrator on, RIN was about 2E-8/sqrt(Hz) at 10 Hz . The attached plot shows the loop performance at different configurations.
For people interested in what the loop performance was downstream. Here is a plot that shows the loop performance at IM4_TRANS and MC2_TRANS. The loop closing is still not robust because of too much noise at the second loop ouput but I am working on understanding it.