jim.warner@LIGO.ORG - posted 15:04, Wednesday 04 February 2015 - last comment - 17:58, Wednesday 04 February 2015(16468)
FF on BSC-ISI's
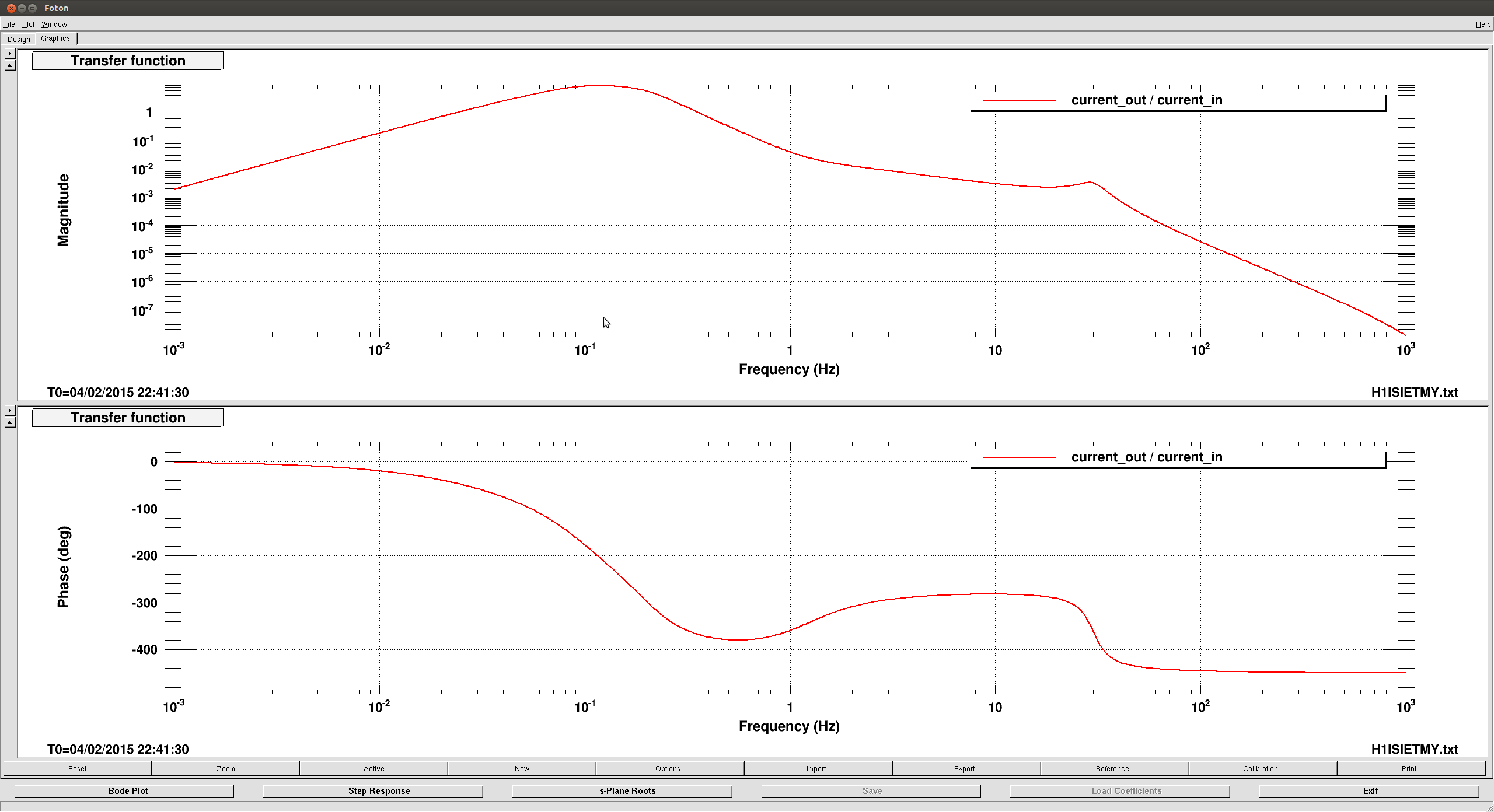
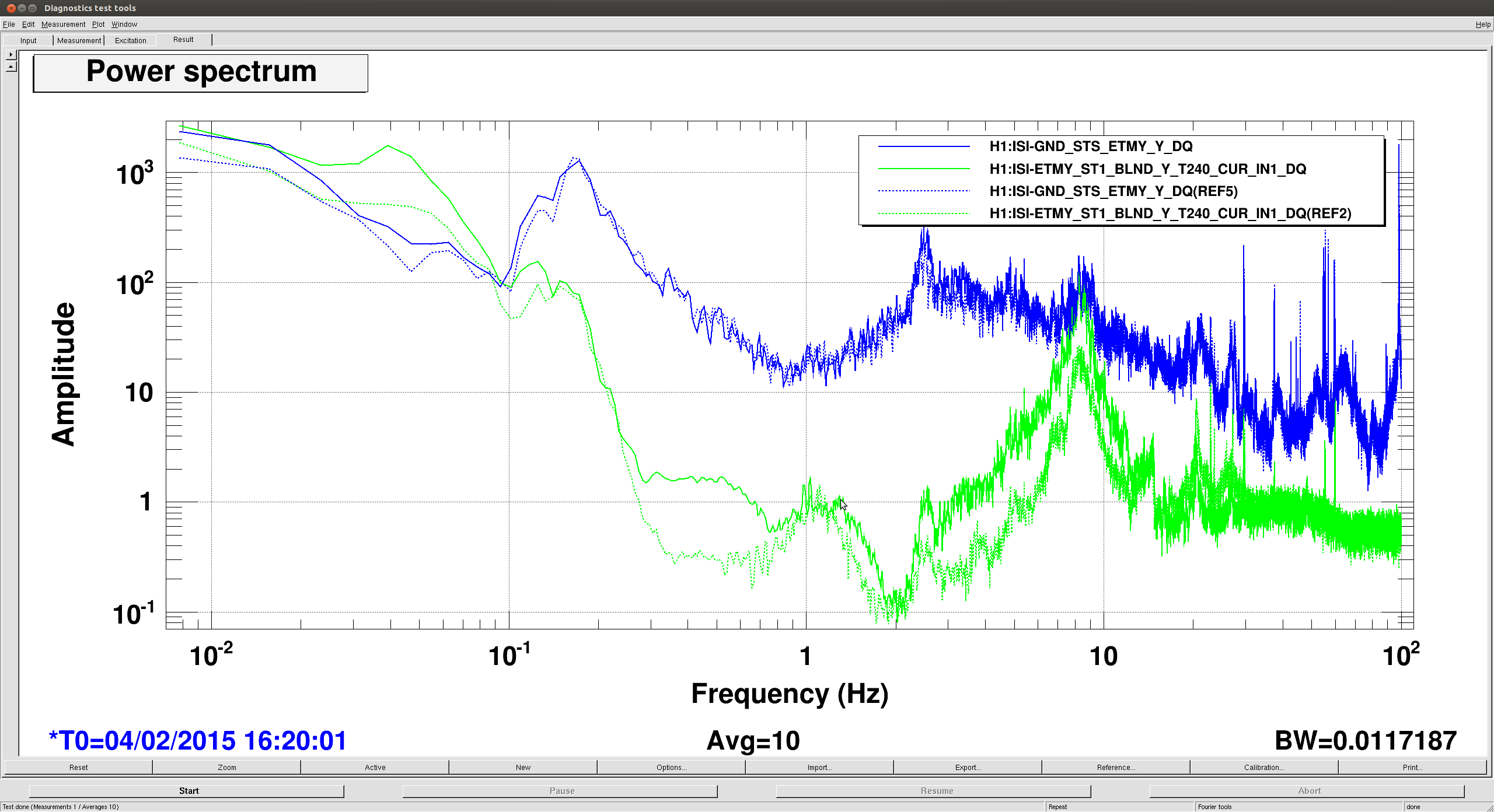
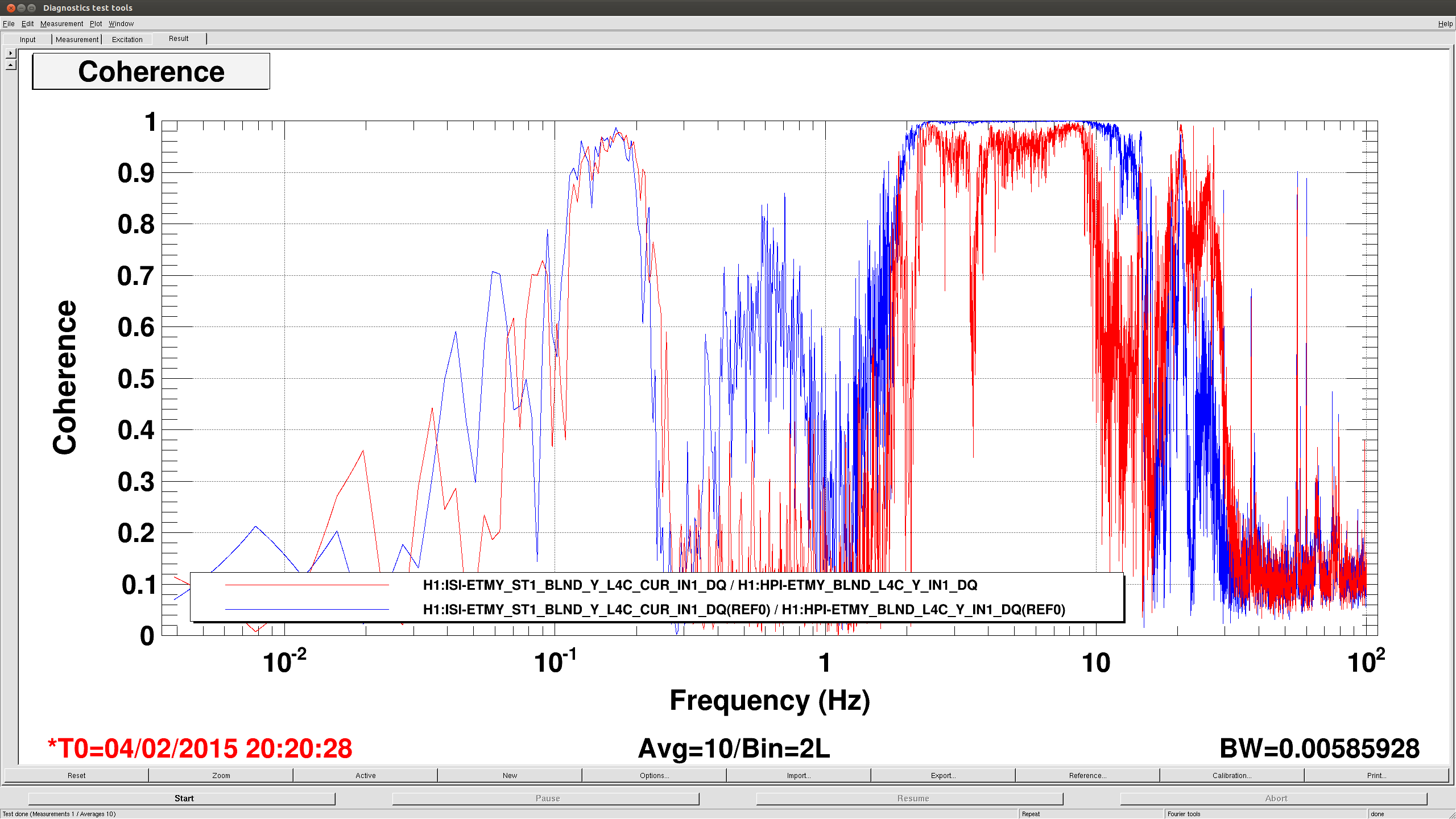
This morning, with prodding from Ryan, I tried turning on a feedforward filter left-over from Vincent's time on OAT. So far, I've only tried it on ETMY and it looks like it is doing good, and can maybe do better. The filter is Vincent's FF01-4 filter (first attached image). Looking at the ISI's T240's it looks like we are getting about a factor of 5 improvement at ~10hz (second image, solid lines are with FF off, dashed lines are with it on, blue is ground, green is the ISI). Finally, there is still coherence between the HEPI L4C's (the FF input) and the ISI's L4C's (last image, blue is off, red is FF on), meaning we can probably do a little better with some gain matching.
Images attached to this report
Comments related to this report
J. Kissel, for R. DeRosa I asked Ryan -- "Why do we get performance improvement frm the ST0-1 feed-forward all the way down to the microseism and below?" He replied -- "Not enough [feedback] loop gain!" I paraphrase the rest of the conversation: - Feed-forward adds extra control authority -- where ever it finds coherence -- without affecting the phase of the feedback loop. This is why we want to use it at ~10 [Hz], where there's plenty of coherence left with ST0, but it's tough to add more feedback loop gain while still maintaining good stability margins. - Because the HEPI input / ST0 motion, as measured by the HEPI L4Cs, is still coherent down to the microseism (because there's not enough feedback loop gain), you still get appreciable feed-forward subtraction. - We want to move the gain authority to the feedback loops, because a feedback loop enforces its own accuracy. In otherwords, feed-forward depends on gain matching and an extremely stable plant. In theory, yes, it doesn't really matter how you allocate the gain, but in practice, we desire an extremely robust system and the plant and sensors are liable to change at the 1% level, which results in a decrease in subtraction and therefore performance. (Assuming perfect phase matching, a gain mismatch of 1%, means you cannot subtract better than a factor of 100, 10% mismatch; never better than a factor of 10. And in practice we don't have perfectly stable phase matching either.) Ryan will work with Jim tomorrow on designing some feedback loops which drastically increase the gain at low-frequencies, so that we're already gain limited below ~5 [Hz], and we only get the improvement from feed-forward between 5-20 [Hz], as I had expected.