daniel.sigg@LIGO.ORG - posted 23:42, Monday 09 February 2015 - last comment - 09:00, Tuesday 10 February 2015(16587)
Tidal Feedback
Looking at the tidal feedback signals during the 2 hour lock shows:
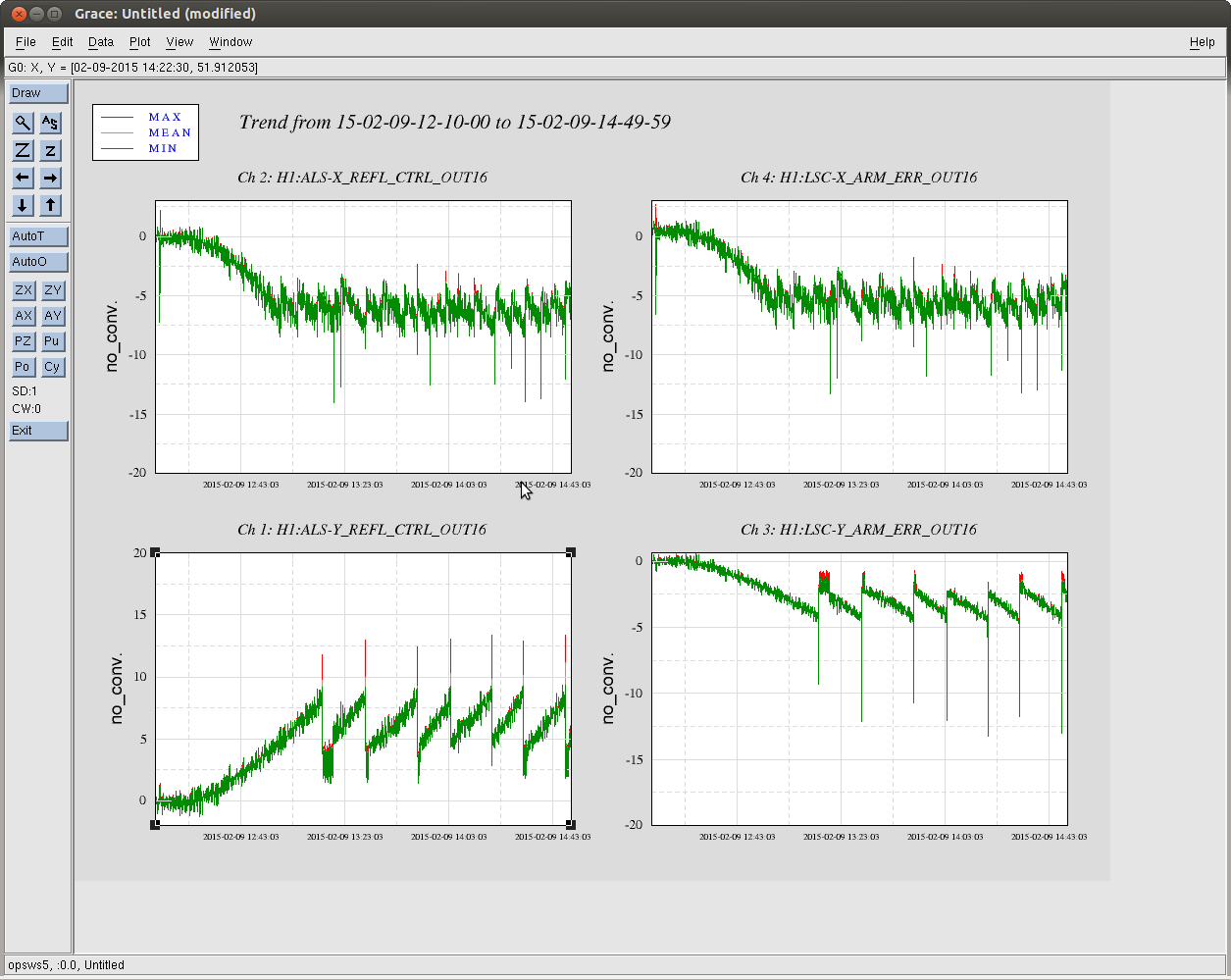
- The calibration of ALS-Y_REFL_SLOW is too small by a factor of 2. In Fig. 1 we see the green REFL_FAST signals running out of range near ~7.5µm. This is corresponds to the full VCO range of 1MHz and is correct. The same is true for X_REFL_SLOW, but the corresponding Y_REFL_SLOW shows a signal roughly half the size. The calibration is the same but the ALS common mode board have different gains in the input and VCO path. The X-arm board uses -7dB and 0dB, respectively, whereas the Y-arm board uses -13dB and +6dB. The Y-arm board should have the same gain as X.
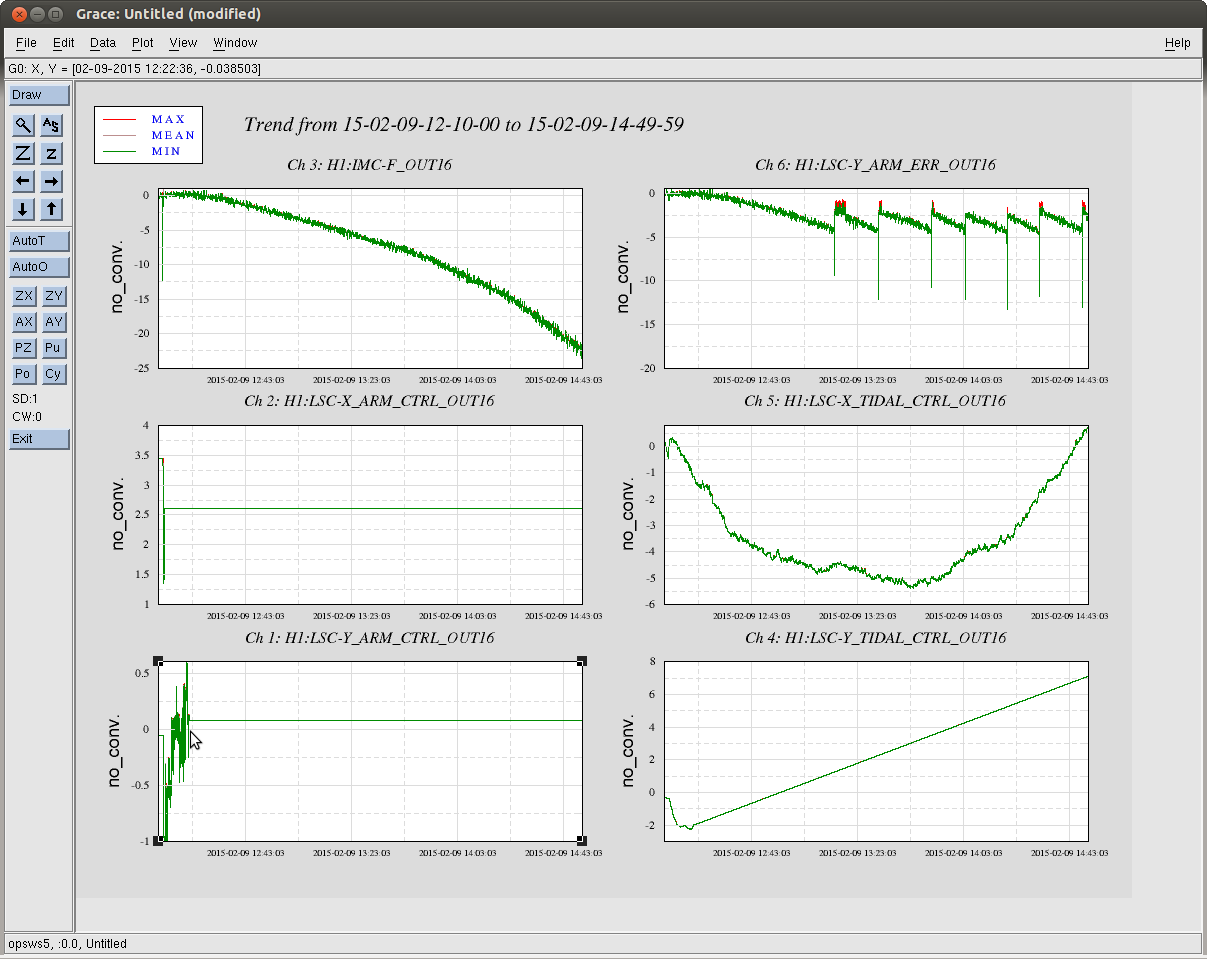
- When the Y-arm tidal servo is switched to red lock, the HEPI feedback runs away slowly, see Fig 2. This is due to the fact that the integrator for the slow Y-arm feedback is holding at its last position, but no feedback is applied to either the ESD or the common tidal. Either the common tidal feedback needs to enabled or the integrator bled off.
- The calibration gains for the common tidal feedback was missing. The MC_F signal is calibrated in kHz and sent to the VCO. With a double passed AOM the gain factor becomes 0.5µm * 1/(2*37.5kHz) ~ 0.007 µm/kHz.
- Driving HEPI to a positive offset seems to lead to a negative MC_F. Meaning, one should be able to just copy the MC_F value into the COMM_ERR offset field.
Script:
#!/usr/bin/python
import ezca
Ezca=ezca.Ezca("H1:")
while True:
val=Ezca['IMC-F_OUT16']
Ezca['LSC-X_COMM_ERR_OFFSET']=val
Ezca['LSC-Y_COMM_ERR_OFFSET']=val
Images attached to this report
Comments related to this report
Changed the H1:ALS-Y_REFL_SERVO_IN1GAIN to -7dB (from -13dB) and H1:ALS-Y_REFL_SERVO_FASTGAIN to 0dB (from +6dB). Also turned on the frequency servo for the VCO on in EY.