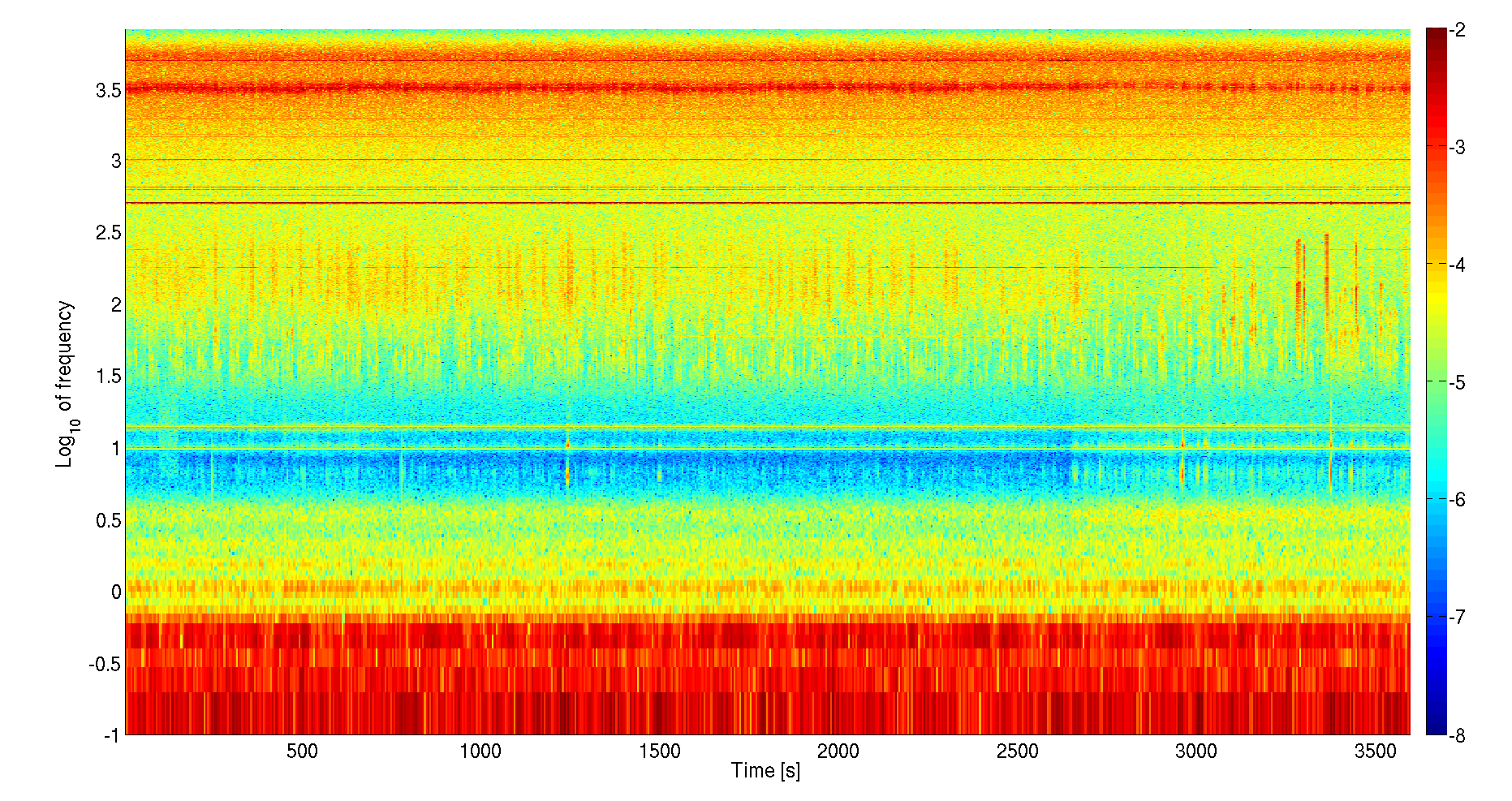
The first attached figure shows a spectrogram of the DARM signal during last night lock. I had a look at one hour of data from 9.00 UTC.
The noise is highly non stationary almost everywhere. Looking at the longer spectrogram in the summary pages, it seems that the ~3 kHz bump got better later in the lock. However, I'm focusing at lower frequencies.
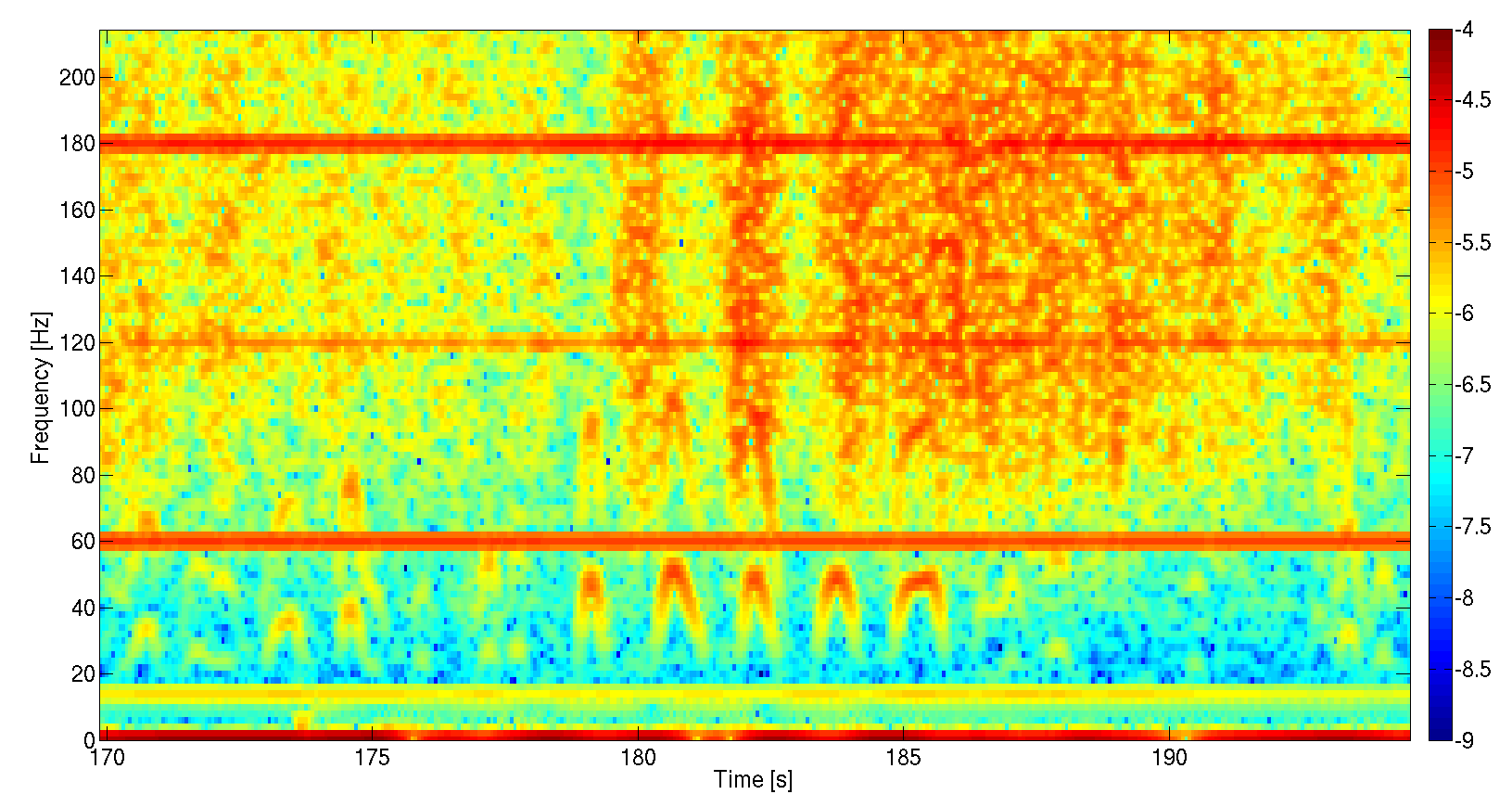
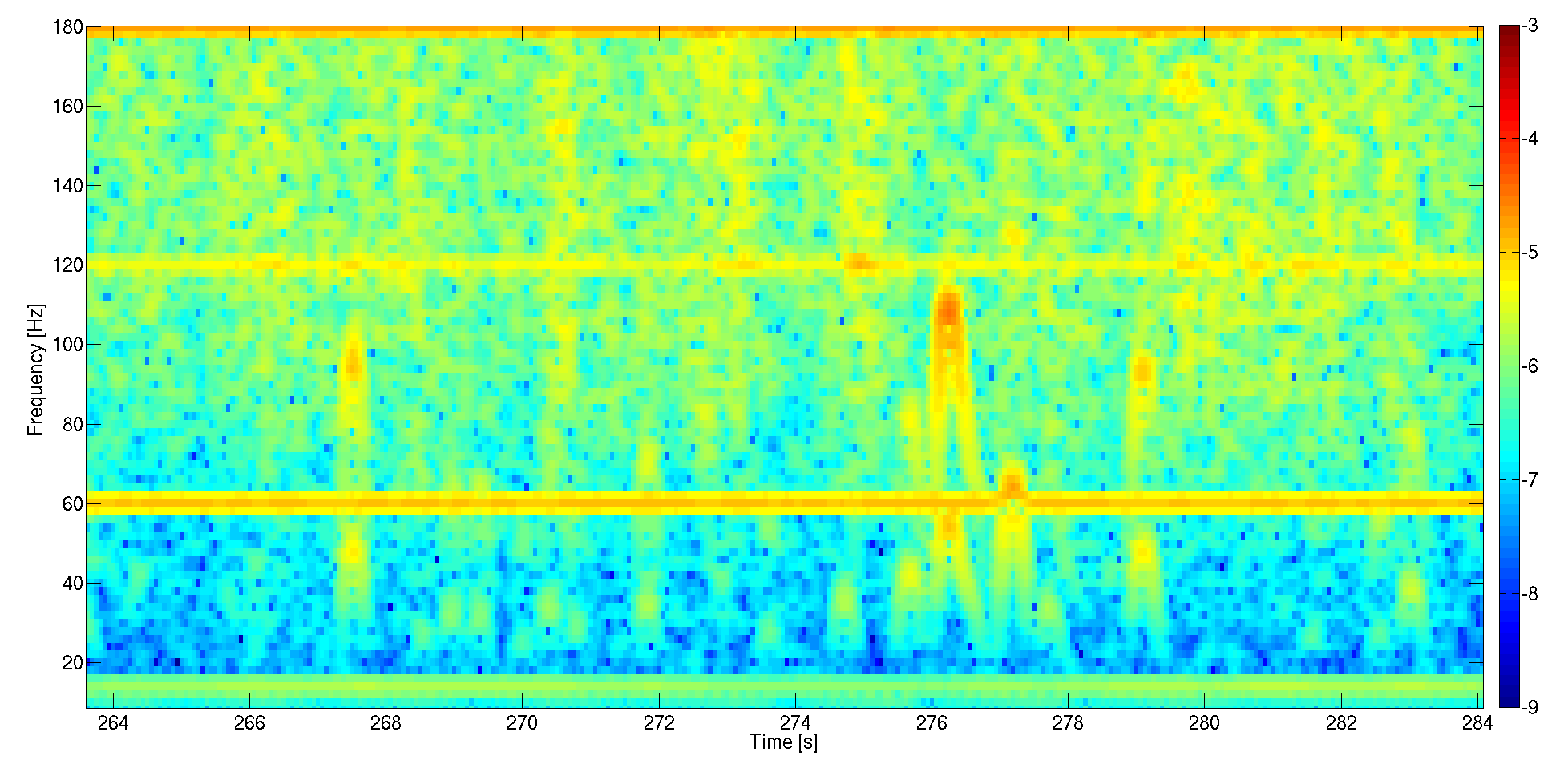
Scattered light
The second and third plots show a clear signature of scattered light arches, that contribute to the sensitivity quite often, and up to 120 Hz some times. I don't know what is causing them yet, but they're quite loud in the low frequency region, which is still relatively noisy.
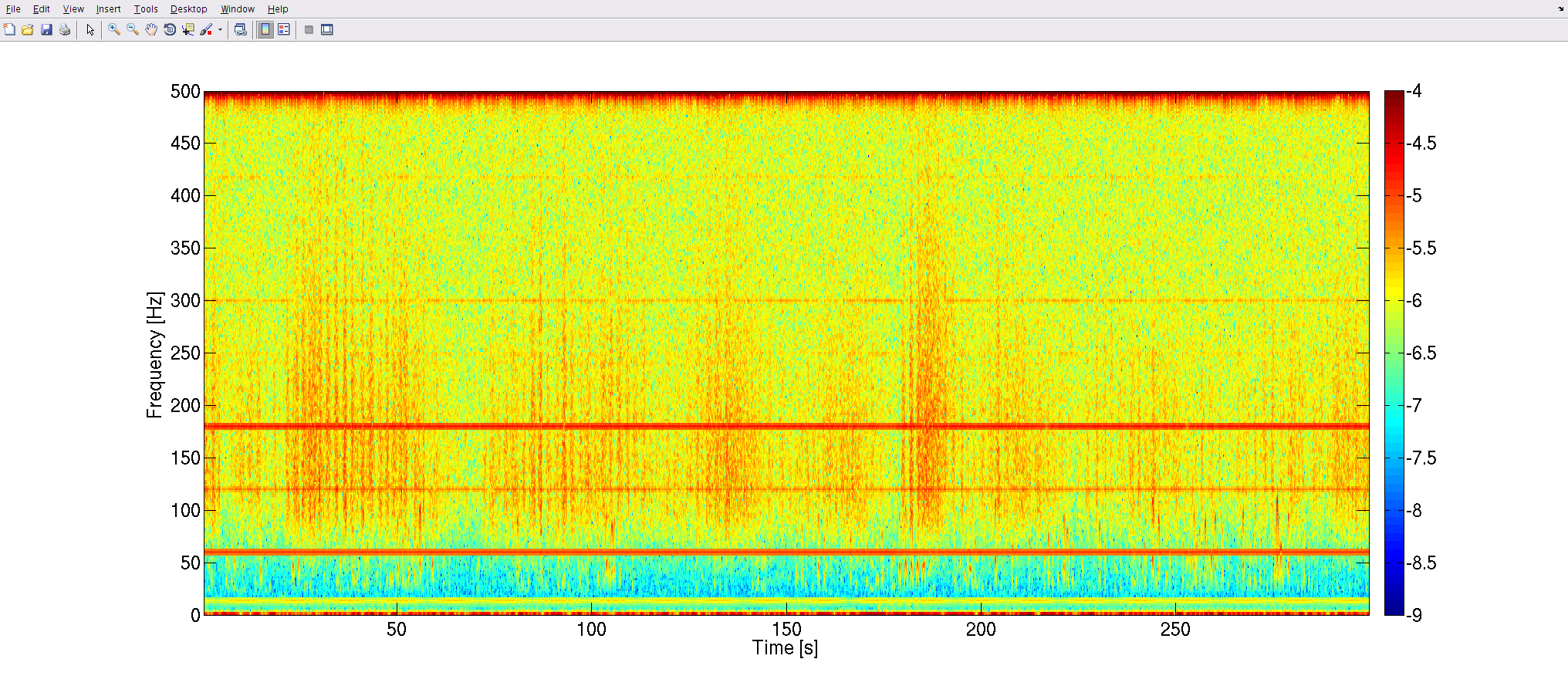
Non stationarity in the hundred Hz region
The region between 50 and 500 Hz is very non stationary, see the 4th plot for a zoom in the spectrogram. To understand this I computed the BLRMS of DARM in the band between 130 and 160 Hz. There are a lot of quite fast excursions, probably glitch like.
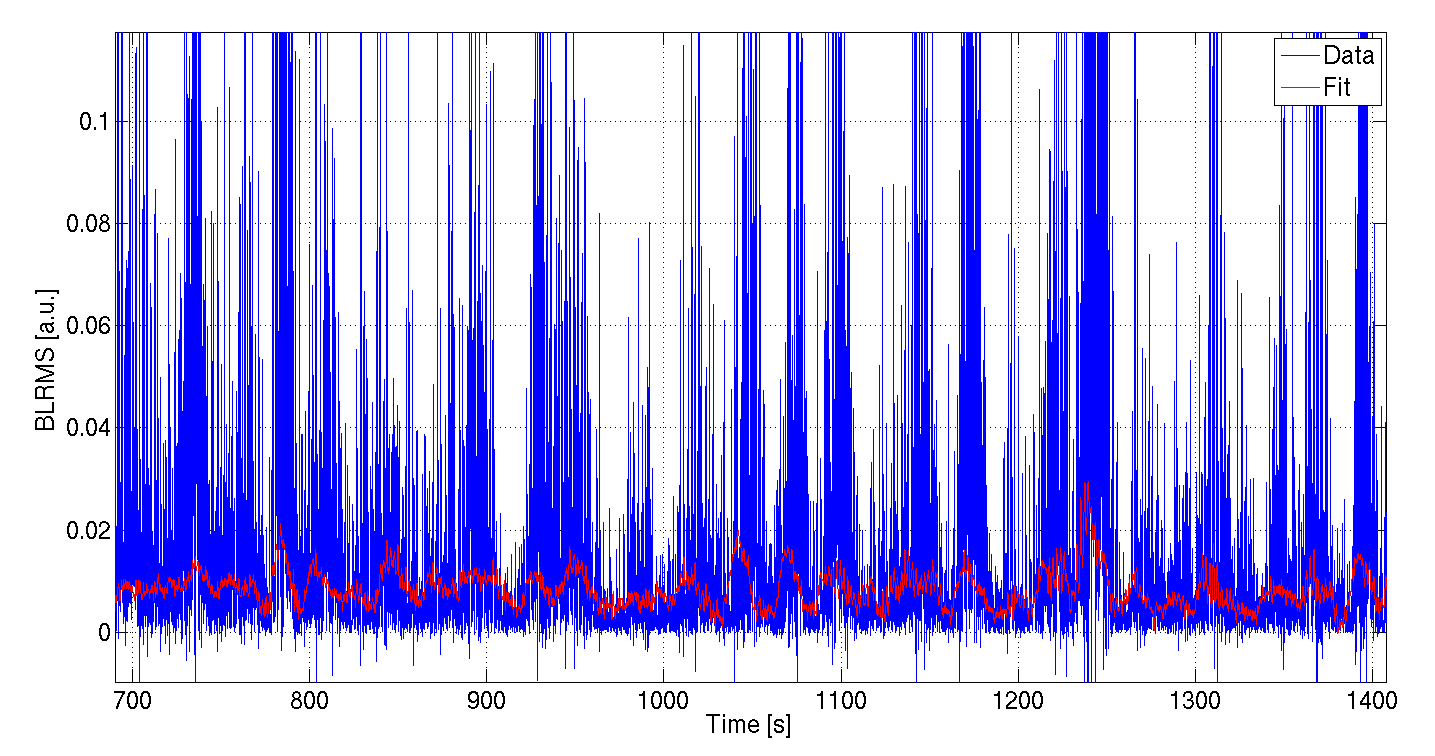
I tried to correlate the BLRMS with angular signals. I could use both the ASC error signals or the local sensors of the optics (optical levers or shadow sensors). The 5th plot shows the result of the fit of local sensors (and their square) to the BLRMS. Altough I'm not able to properly reconstruct the largest BLRMS excursions, the trend seems quite explained by the angular motion. It's likely that when we have a larger than normal angular excursion, some highly non linear phenomenon create an increase of noise that I can't easily catch with my analysis.
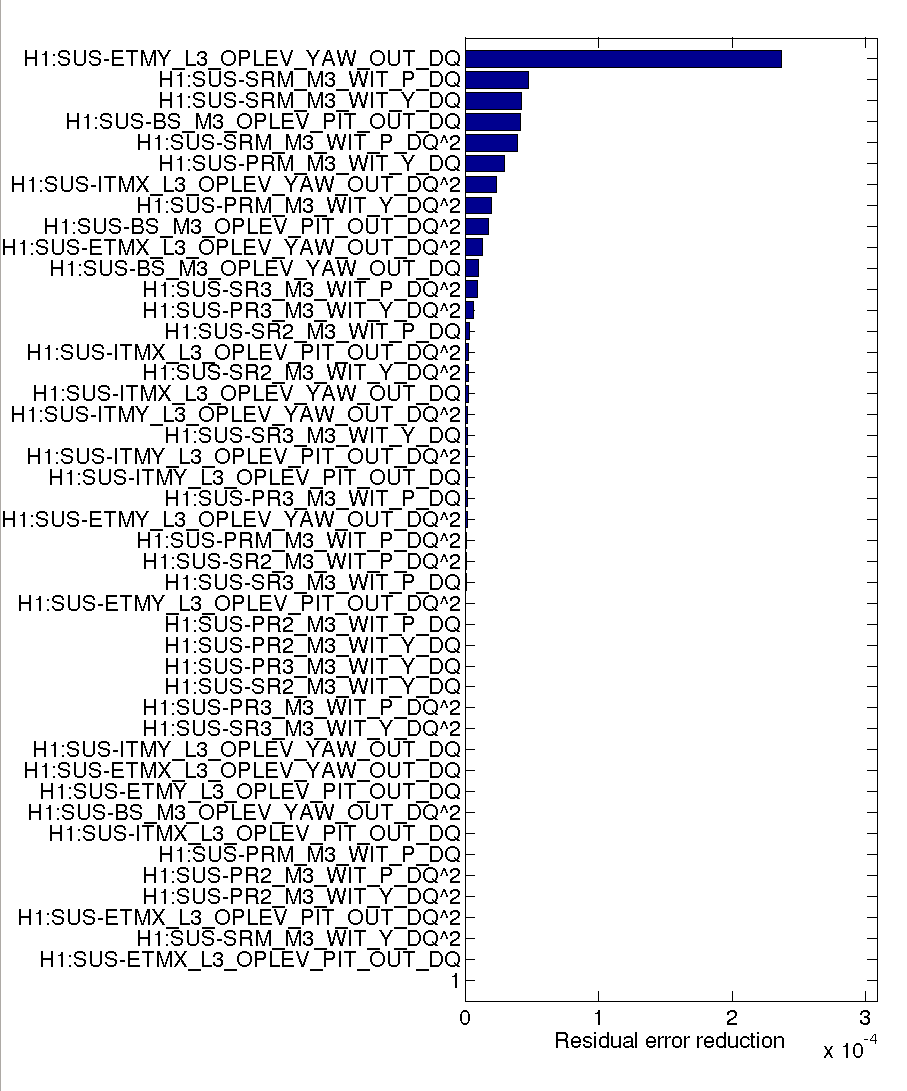
I used a channel ranking algorithm to find out which angular motion is mostly rsponsible for the BLRMS variation. The algorithm is the same already used at LLO, with small improvements. The code is attached. basically, the algorithm starts with the BLRMS and fit every channel one by one to it. It selects the channel that gives the largest reduction in the residual error. It then moves on again, fitting the residual of the first fit again with every single channel, and select again the best one as before.
The result ranking, shown in the last attached picture, is that the most relevant motions seem to be: ETMY_YAW, SRM_PIT, SRM_YAW and BS_YAW. As a reminder, DHARD PIT has 3 hz bandwidth, while YAW is still low.