hugh.radkins@LIGO.ORG - posted 15:02, Tuesday 03 March 2015 - last comment - 17:41, Tuesday 03 March 2015(17050)
WHAM1 HEPI Isolation (Position) Loops, what is it good for?
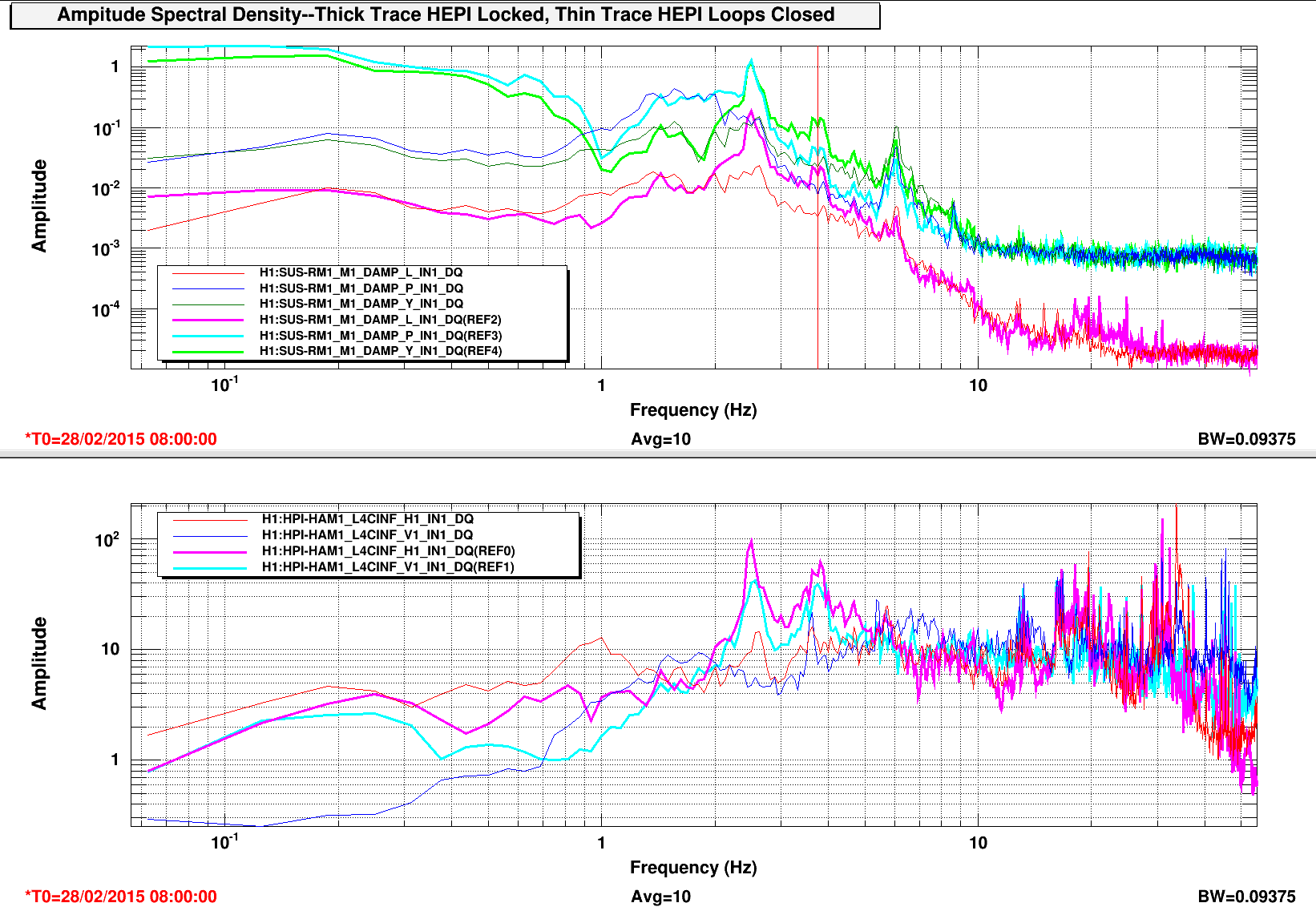
Friday morning Jim and I unlocked WHAM1 HEPI and closed the position loops. It looks like this reduces peaks at 2.5 & ~3.75hz, may have some gain peaking reinjection around 1hz and shows good pitch & yaw motion reduction below 1hz as seen by the RM1_M1_DAMP IN1s.
The attached ASD shows the RM1_M1_DAMP_L/Y/P_IN1_DQs. The lower plot group has a couple HAM1 L4Cs. The thicker light colored reference traces are from Thursday 0800utc and the dark thin current traces are from Saturday 0800utc. There is a peak in the RMs at 6hz that may be amplified in the current traces; it is hard to tell but the ISI may be amplifying that peak.
Images attached to this report
Comments related to this report
J. Kissel, H. Radkins A little more information, after discussing this with Hugh. - Recall that the H2 L4C is busted -- I've just opened an Integration Issue about it (see II #1022), but it's been confirmed busted as early as Oct 2014 (see LHO aLOG 14249). This means that we can't necessarily trust the X, Y, or RZ spectra -- matrices have not been recomputed to account for the dead sensor. - Recall that the RMs are on top of the HAM1 stack. The best information about the predicted performance of the 3-layered, viton cork, HAM1 stack is Peter's note, T1000310. This suggests that the horizontal stack resonance might be around 2.5 [Hz], and 7 [Hz] in vertical. I haven't been able to find any plots showing the predicted transmission. - Recall that RM1 and RM2 are oriented in such a way that there longitudinal direction is roughly aligned with the IFO's X direction (see D0901821). - Recall that RM1 and RM2 are HTTS's or Tip Tilts. They're longitudinal/pitch resonant frequencies are modeled to be at 1.3 / 1.6 [Hz], and have built in eddy current damping to control Transverse, Vertical, and Roll. The vertical mode is at 6.1 [Hz]. Transfer functions can be found modelled in T1200404. - The HTTS have BOSEMs for sensors, whose expected noise floor is roughly 6e-11 [m/rtHz] above 10 [Hz]. Scaled properly to Longitudinal, with four sensors, that's sqrt(1/4)*6e-11 [m] = 3e-11 [m/rtHz]. - OSEMs, in general, are *relative* position sensors. That means below the resonance of the SUS, the response to displacement falls off at lower frequencies as f^2, because there *is* no relative displacement between the sensor and the target. - We don't really expect that much information in P and Y on the RMs, with respect to the motion of the center of mass of the table. Maybe we can gleen some information from Yaw, but given that they're close to the edge of the table, it might be a good bit of transverse motion showing up... what I'm really saying is that these DOFs will be too messy to discern a good, diagonal, Cartesian, coupling mechanism. - The above data was taken with HAM1 either at air, or half-air -- some transient state of the HAM1 vacuum system. Further both of Hugh's spetra were taken at 08:00 UTC, which is midnight PST, which is well before the time when we can rule out the commissioning vanguard messing with/aligning the RMs and or having the RMs affected by locking transients. All the above being said -- I took some data two hours after each of Hugh's measurements -- i.e. 10:00 UTC, or 02:00a PST on Feb 26 2015 (when HEPI was locked) and on Feb 28 2015 (when HEPI was unlocked, position controlled with sensor correction ON -- LHO aLOG 16983 indicates the rapid turn on happed on Feb 27th). - I don't see nearly as much of a change in performance between the two times - I don't see the features at 2.5 and 3 [Hz] in either data set - One can argue that we see the 1.3 / 1.6 [Hz] modes of the suspension -- and *maybe* the well damped modes of the stack at 2.5 [Hz]. - We can *definitely* see the HTTS V mode at 6.1 [Hz]. There's a feaure just below this in the HEPI L4Cs -- but I don't think it's related to the HTTS mode - One could easily argue that the difference in motion between the HEPI locked vs. HEPI unlocked and ON between 0.5 and 5 [Hz] is the day-to-day difference in ground motion. - The BOSEMs on RMs 1 and 2 are meeting or beating their predicted sensor noise at ~20 [Hz] and above. I don't understand how RM1's noise can be so far below the prediced sensor noise below 0.1 [Hz] -- I don't trust it. - There is still ample coherence between 0.1 [Hz] and 10 [Hz] between the HEPI L4Cs and the BOSEMs. I think bother the lower and higher frequency edges where the coherence drops off is because the sensors get buried in their sensor noise, not because the real motion ceases to couple. Remember Jim has some data (see LHO aLOG 16983) that also shows ambiguous performance. He's got some more this morning with sensor correction ON vs. OFF, and will post later. So -- data is still fresh -- lots to think about -- lots of room for improvement.
Non-image files attached to this comment
