After staring at the data I posted yesterday with JeffK, he suggested we try blending lower on the ISI in RZ. I saw that the blend filter we use on the HAM's was installed already on ETMX, so I decided to take advantage of this morning's non-commissioning period to make some measurements. The results are, um, good. See attached plots. Blue (st1) and green (st2) are the nominal configuration, red(st1) and brown(st2) are the different blend in the first plot, which is calibrated to rad/rthz. Second plot shows the CPS (low pass) part of the two blends, blue is the nominal, red is the new blend. I'm only attaching the RZ data, but every other degree of freedom shows improvement, which I only kind of understand, considering the ground motion was worse after I changed blends.
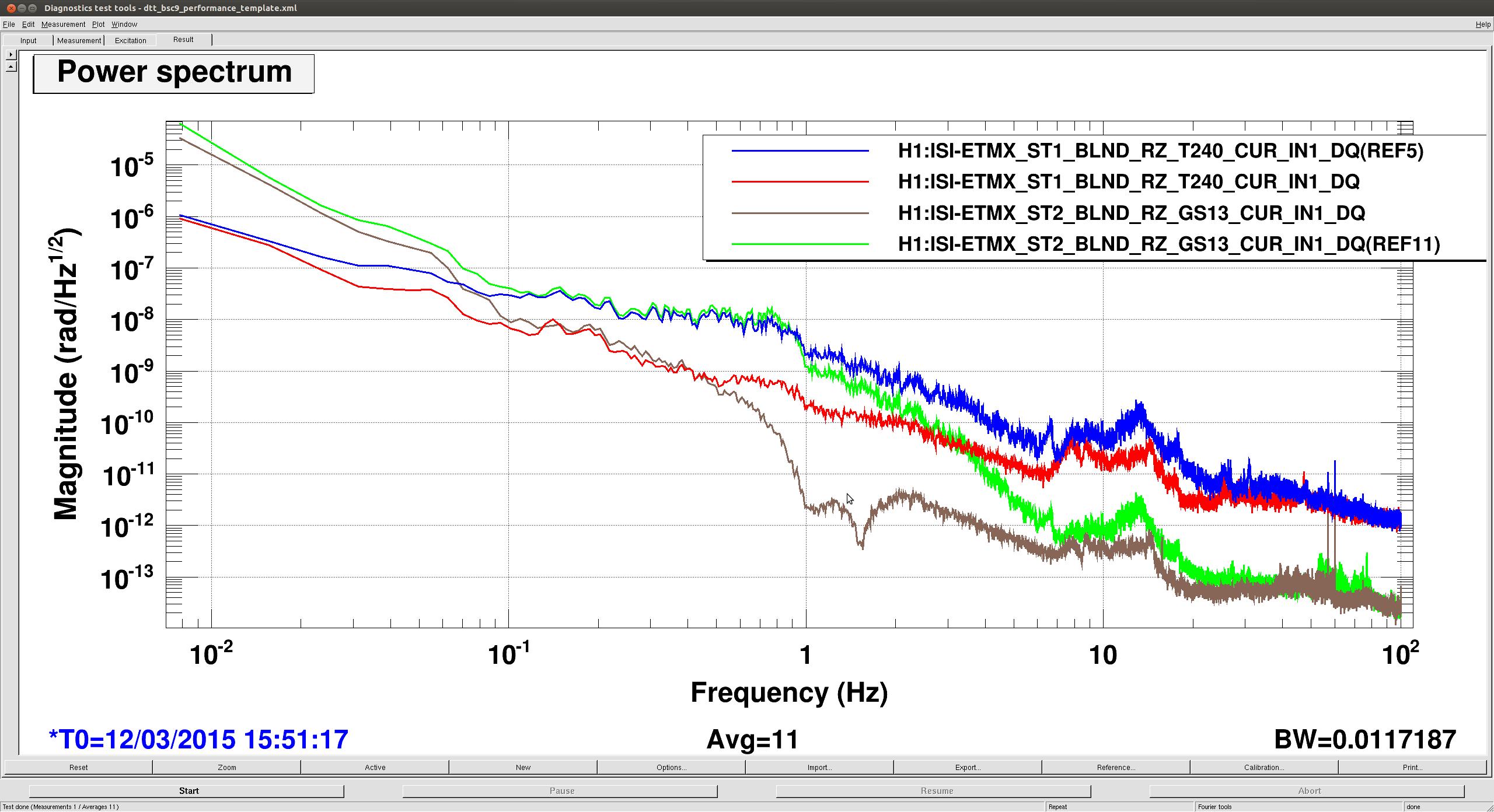
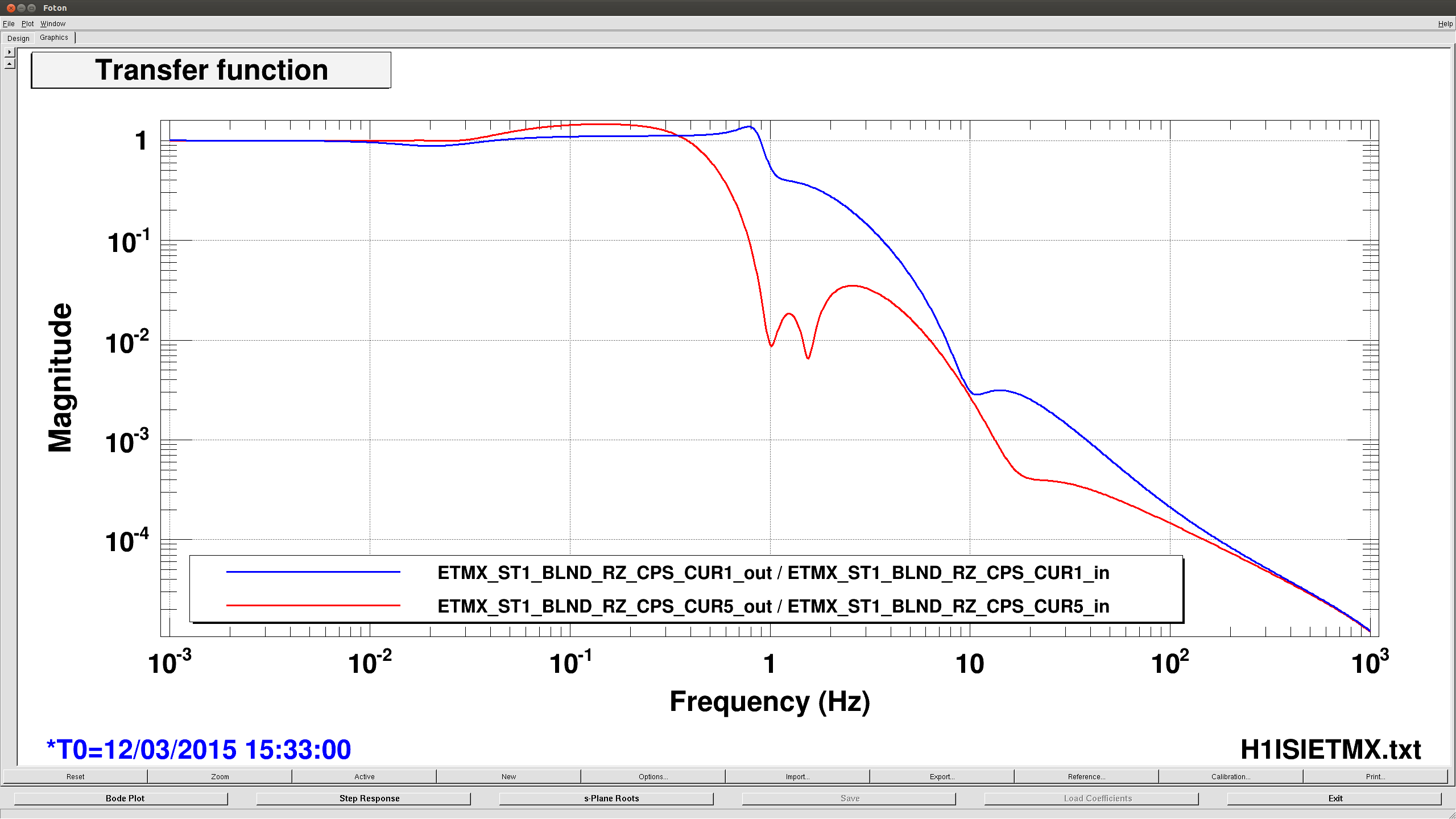
J. Kissel, J. Warner During the process of exploring this better noise performance with ST2 RZ loops, he found that both the ETMs had been mistakenly running the high-blend-frequency, T750mHz, Z and RZ blend filters. This is why the performance in Z and RZ shown in LHO aLOG 17197 has a similar frequency dependence around 1 [Hz] as the 750 [mHz] blend that Jim shows in his second attachment, and why the performance in RZ isn't as good as expected. Recall that in this frequency region, assuming a single-stage-like system, if we're not limited by measurement noise (because we're using the GS13s to assess the performance), then we're limited by the ST2 CPS filtered by the displacement sensor blend (see T1300645, G1400134, or P1000103). If one only saw Jim first plot, one might switch all BSC ISI ST2 platforms to the HAM, 01_28 blends. However (a) we later compared the 01_28 RZ performance (in brown) against the GS13 sensor noise, and the awesome double-notched out performance at 1 [Hz] is below the sensor noise -- the classic deceptive flaw of looking at an uncompensated in-loop sensor, (b) the HAM 01_28 blends have a really broad-band gain peaking of (a max of) ~1.5 between 30 and 500 [mHz], which translates to an order of magnitude (or more) more displacement below 0.1 [Hz] as shown in Jim's plot (we compared the ground motion in the two plots, and they're comparable, so it's not that there was an earthquake or high winds), and (c) Jim ran out of time, so he hasn't added the 01_28 filters to every BSC yet. In regards to (b), why does a displacement sensor filter gain peaking of 1.5 result in a factor 10 amplification and not just 1,5? As the good Dr. DeRosa says in SEI aLOG 645, "You always get MORE motion than the predicted gain peaking / amplification (below the microseism) because the tilt decoupling isn't perfect." In lieu of switching everyone's Z and RZ to the 01_28 blends, Jim switched all of the platforms to the T250mHz blends. See attached for a comparison of all three options. I think that the T250mHz will be the best compromise, because (a) The gain peaking is limited to a smaller region of 30 to 250 [mHz], and only maxes out at ~1.3, (b) The notches in the HAM 01_28 blends are just digging us deep into the GS13 sensor noise floor. We will probably hit the GS13 noise floor with the T250mHz blends as well. We'll check the performance overnight, especially with an *aligned* optical lever, and re-evaluate.
