jeffrey.kissel@LIGO.ORG - posted 17:21, Tuesday 31 March 2015 (17581)
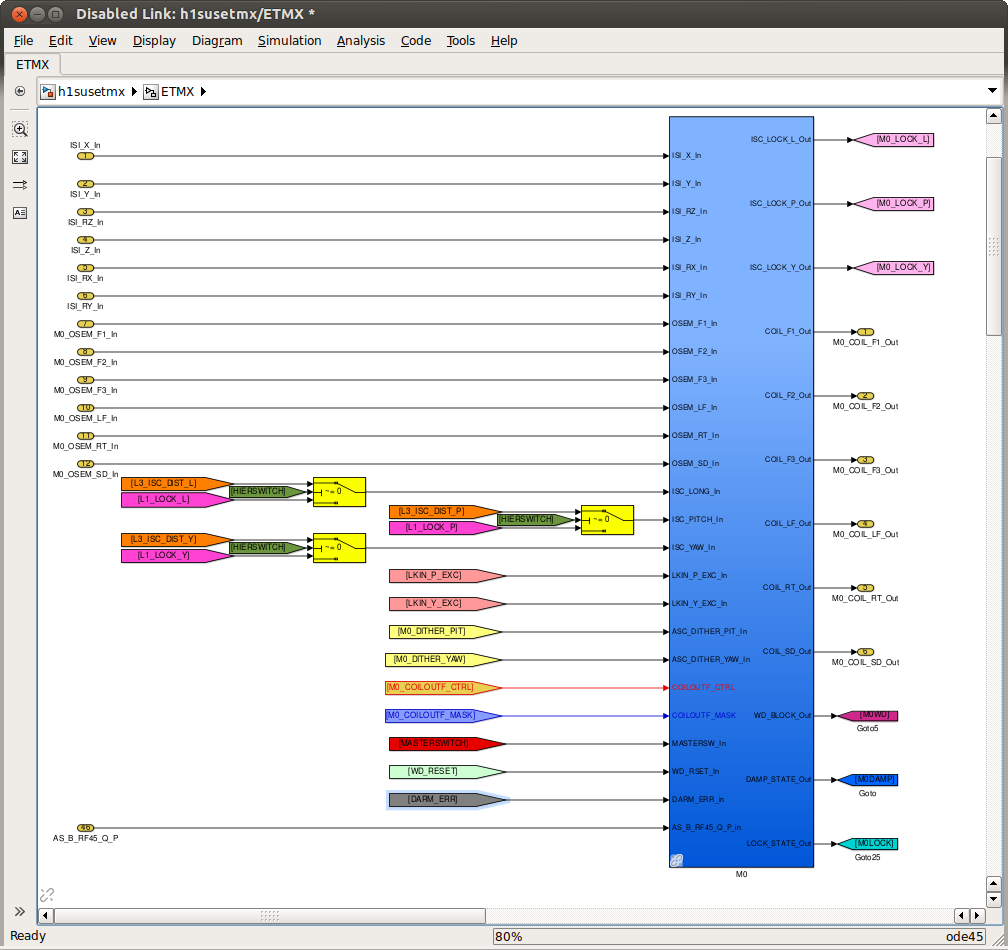
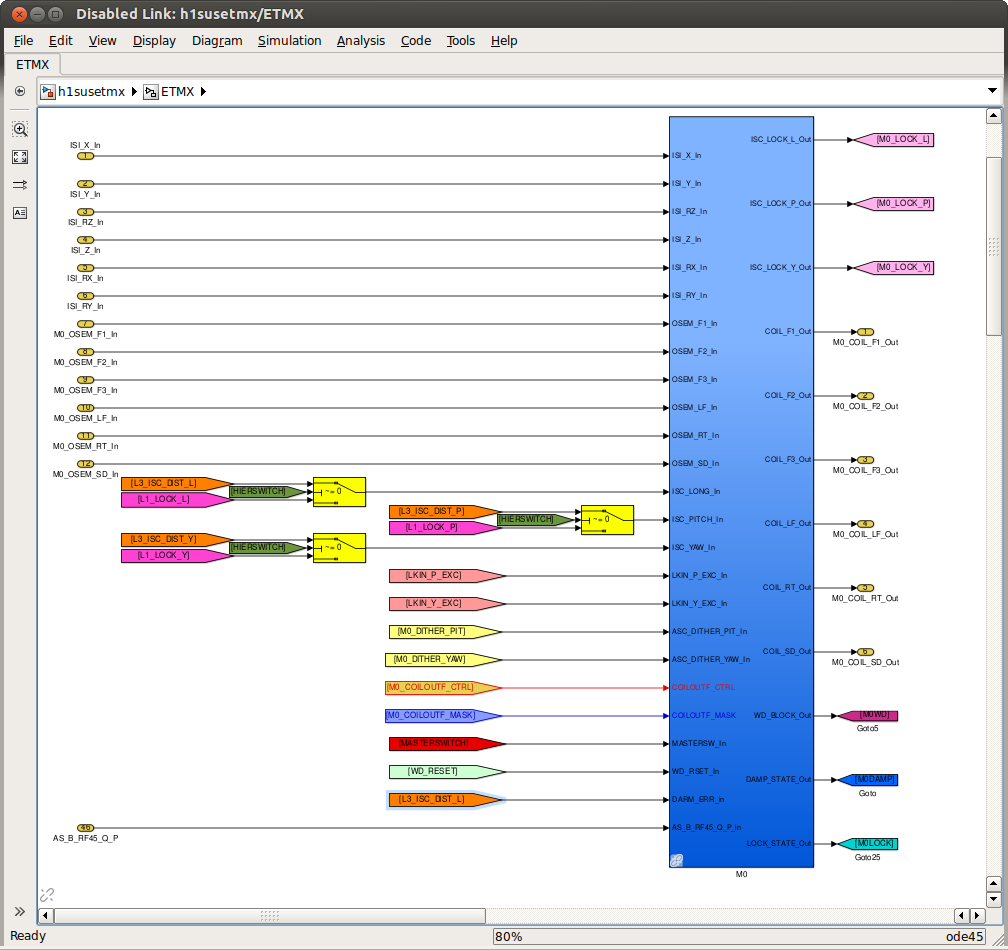
QUAD V4&R4 ('Bounce' and 'Roll') Mode Damping Error Signal for Top Mass / M0 Filterbanks Switched from DARM_ERR to DARM_CTRL
J. Kissel, K. Izumi WP #5128 As per Rana's suggestion (LHO aLOG 17473), we've switched from using (the equivalent of) DARM_ERR to using (the equivalent of) DARM_CTRL for the error signal used for the M0/Top Mass, highest Bound and Roll mode damping of the QUADs on the ETMs. Details: - Thankfully, this did *not* require adding any new IPCs -- all we did was replace the DARM_ERR M0 top-mass input "from" tag with a copy of the L3_ISC_DIST_L "from" tag, which is equivalent to the output of the L3 ISCINF L filter bank, which is post-IPC-signal-conditioned equivalent to the DARM_CTRL pick-off in the OMC model that's (of course!) already sent via RFM IPC from the corner to the end station. See attached screenshots. - Because the all of the top level QUAD models are unhooked from the library (thanks to how tidal has been implemented differently at both sites, and which ASC sensor is used for damping the violin modes), this was an easy swap of "from" tags to the just-below-top-level QUAD block in each of the four QUAD models: /opt/rtcds/userapps/release/sus/h1/models/ h1susetmx.mdl h1susetmy.mdl h1susitmx.mdl h1susitmy.mdl and required no DAQ restart. This also therefore doesn't impact LLO or the QUAD library parts. All top level models have been committed to the repo. - The models were compiled, installed, and then the restart was coupled with the recalibration of the QUAD computer's 18-bit DACs (separate aLOG pending).
Images attached to this report