Yesterday ran Range of Motion and Linearity Tests. Took Spectra as well and then ran TFs overnight.
For the ROM, which evaluates based on the free hang position, not from zero, H1- was limited to 0.8mm. This is not necessarily running into anything as the sensor (IPS) was just running into the sensor max. In other words, the sensor position could be adjusted (along with the cartesian Isolated-to position) if the true centering of the Actuator could tolerate that. Also for V4-, it was hitting something and the range was limited to 0.7mm. I have not investigated this.
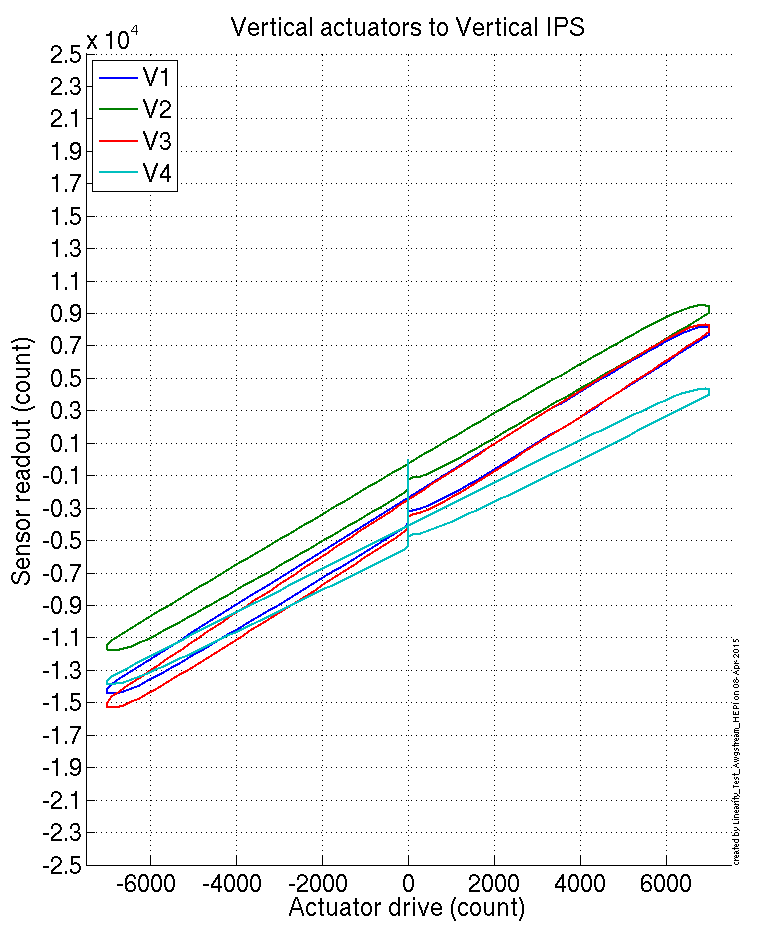
The linearity tests are possibly within spec (don't have a number of what that should be) but here V4 is also an outlier having a lesser slope than the others. See attached, V3 also looks weird here but the range of motion is fine for V3 which drives further than the linearity test so if it is running into something it must be compliant.
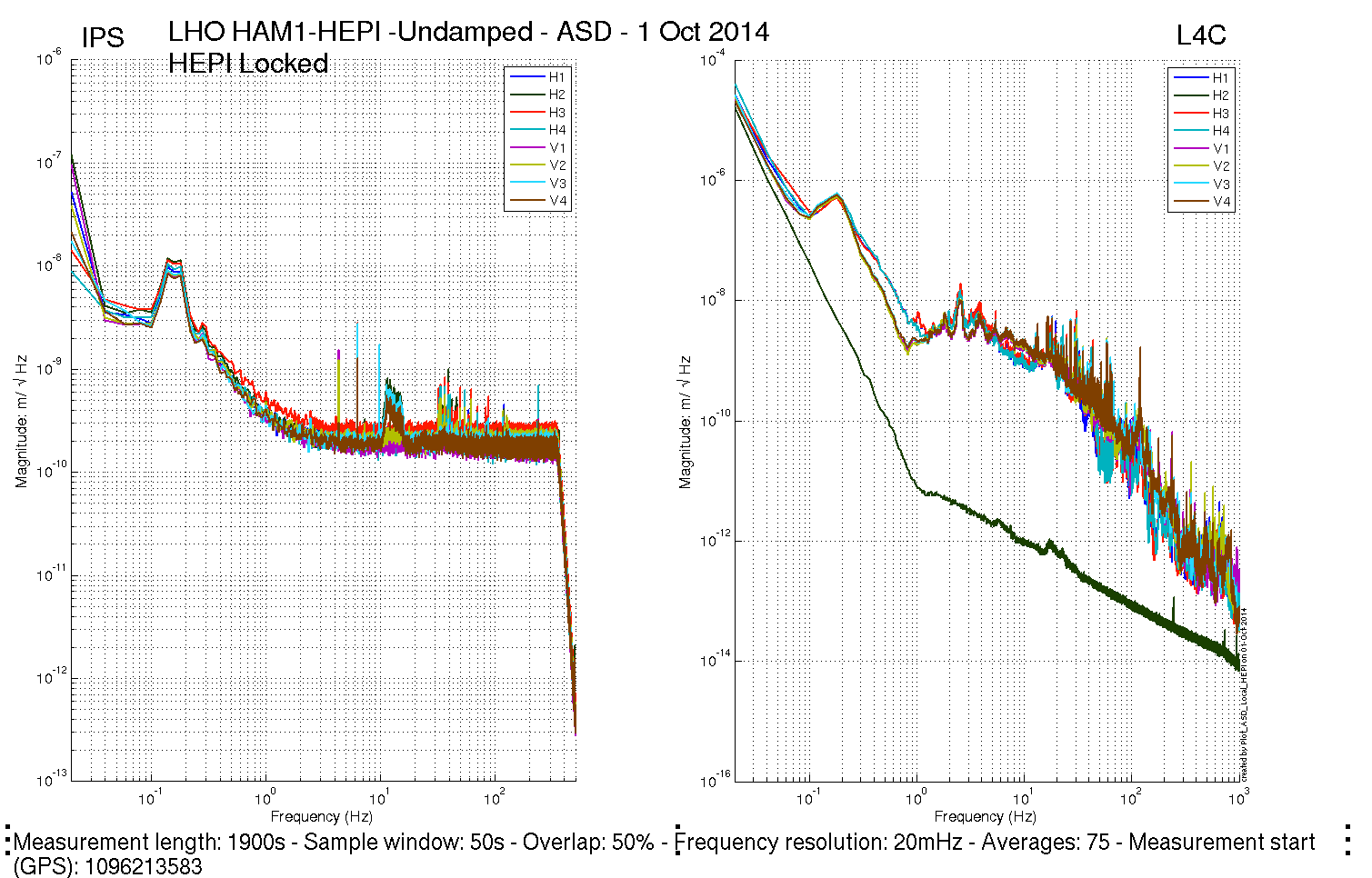
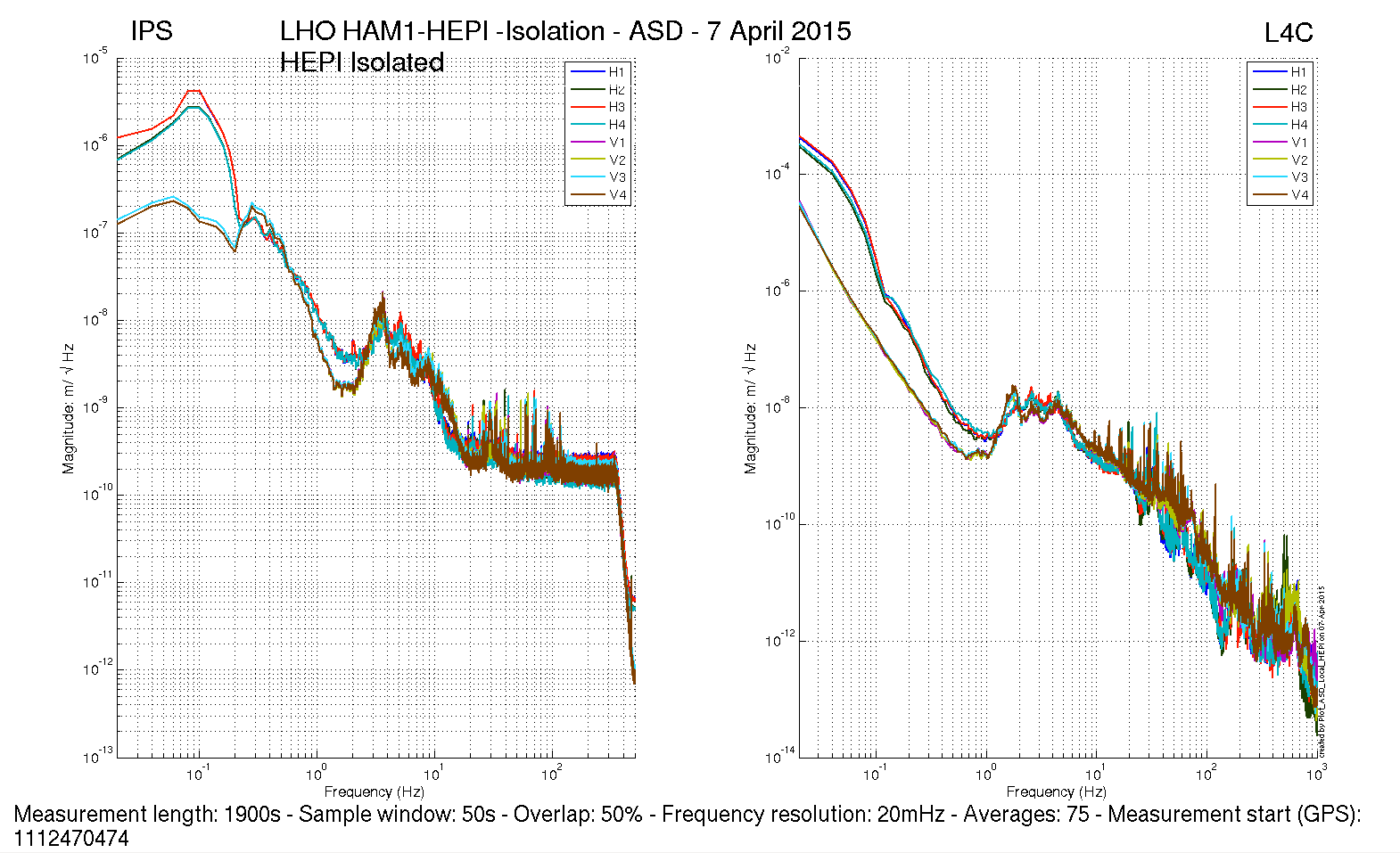
The new L4C looks good though. Attached are Spectra from last October and Yesterday. I collected Isolated spectra yesterday and the data from October is 'Undamped' but the improved health of this L4C is apparent. I can get Isolated from a few days ago before the swap.
TFs to come.
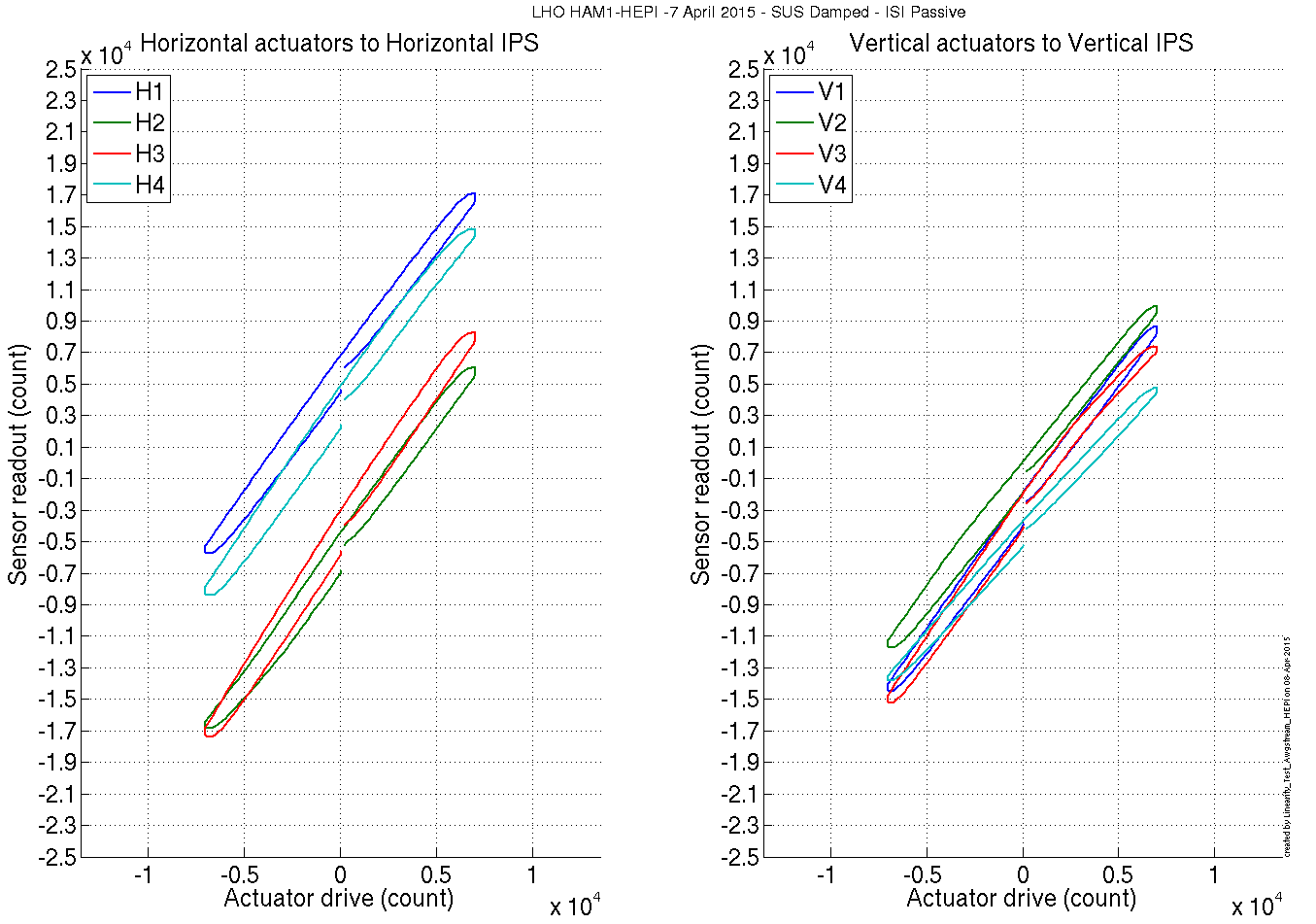
Re Linearity & ROM. Looked at V3 and V4. From the free hanging position, it appears the platform is hanging low at V4 and the Actuator Plate will run into the Bellows Shield hence the low V4- ROM. To fix this we'd have to get on the Big DSCW Springs and raise the platform. I think the install process needs to change to ultimately address this: after Initial Alignment, run ROM and excitations etc. letting the platform settle to its ultimate resting place. Raise the platform with the Springs and repeat until it sits where we want.
For V3, remember, the slope on the Linearity plot appears to roll over at the positive side of the curve. I checked and although V3 also hangs low like V4, this is a positive (up) issue. Looking closely, the top of the Foot at the back rib looked pretty close to the notch in the Rear Caging Brace. For a vertical motion, this contact would be a glancing impact and the Foot could shift sideways and get further vertical displacement. I raised the Rear Caging Brace and reran the Linearity measurement. See attached and compare with the above plot. The slope is restored and shows no roll over. Nice when something works as expected.
Given the magnitude of these tests and the actual motion we need for ops, these interferences would not have impacted performance. However, we could over time possibly walk the platforms to a point where it does matter.