Sheila, Evan
ASC
Sheila finished taking the ASC sensing matrix data, so we now have pitch and yaw data to analyze.
Last week, we were not able to turn up the gains on the AS36I→SRM loops by more than a factor of 3, even with the HSTS compensation engaged. Tonight we were mysteriously able to turn them up by a factor of 7. They have a step response time of 2 s or so.
dETM boosts (FM1 for pitch and yaw) now come on automatically in the ENGAGE_ASC state.
OMC length
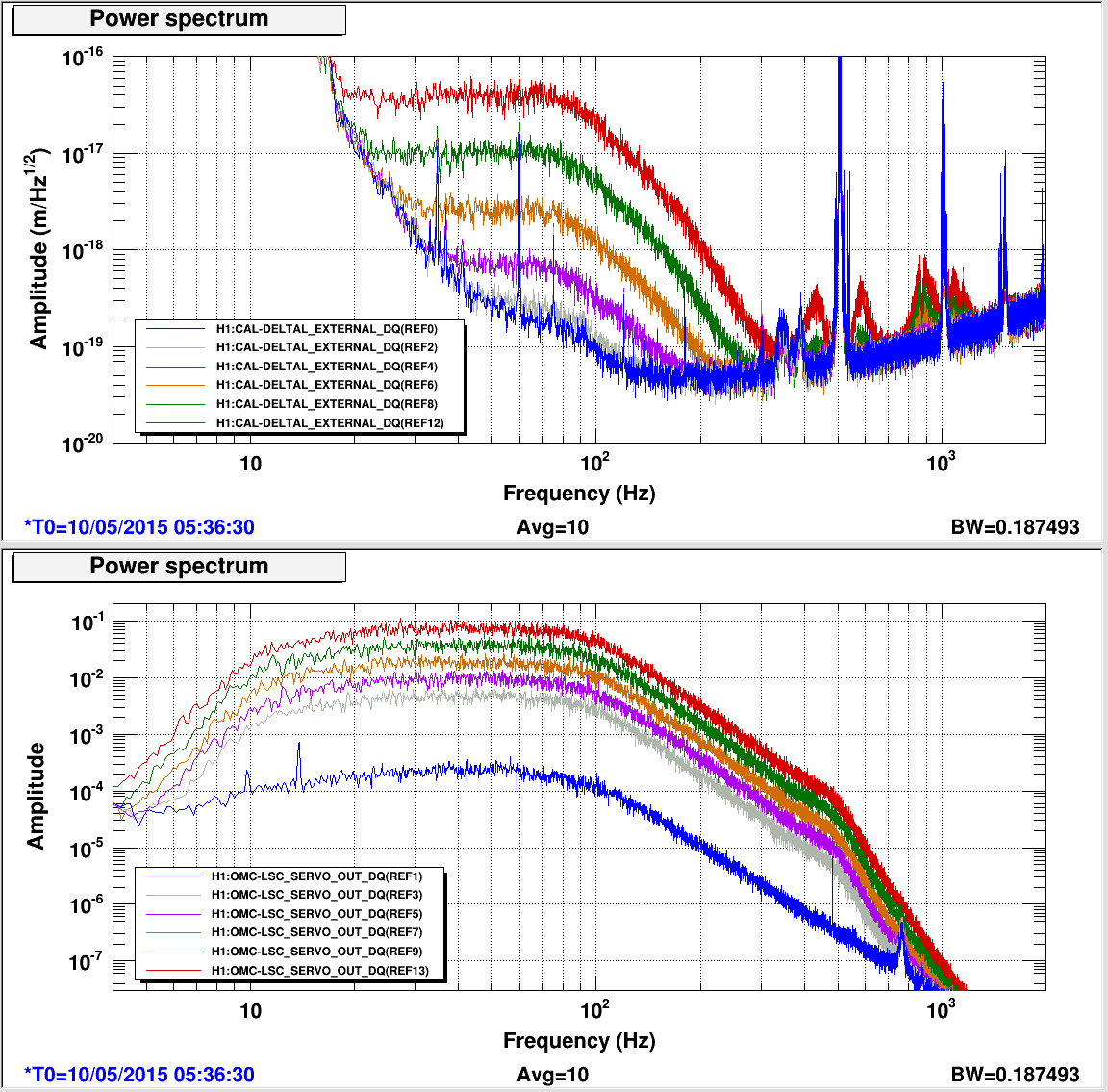
We looked briefly for any evidence of DARM contamination from OMC length noise. We drove at the error point of the OMC length servo with broadband noise and watched the response in DARM. We cannot see any linear coupling between 10 Hz and 1 kHz (the coherence is <0.1). The coupling seems to be quadratic in drive strength; as the drive level is stepped up by a factor of 2, the noise in DARM increases by a factor of 4 (see attachment). If one looks at the red, green, and orange curves and extrapolates the quadratic behavior to the unexcited control level, it seems that the contamination in DARM near 80 Hz would be a little above 1×10−22 m/rtHz.
There is, however, high coherence between DARM and OMC length from 2 to 4 Hz, with no excitation.
Thermal (?) drift
We still seem to be battling a drift seen in POP90 (also seen in REFL_LF) which limits our locking time at 10 W to about 2 hours. This seems to be very repeatable: POP90 continually rises until, after about an hour, some of the ASC yaw loops start to show low-frequency instability (particularly the cETM and SRM loops). After another hour, the instability grows so large that the interferometer unlocks. If we want longer locks, we have to fix this.