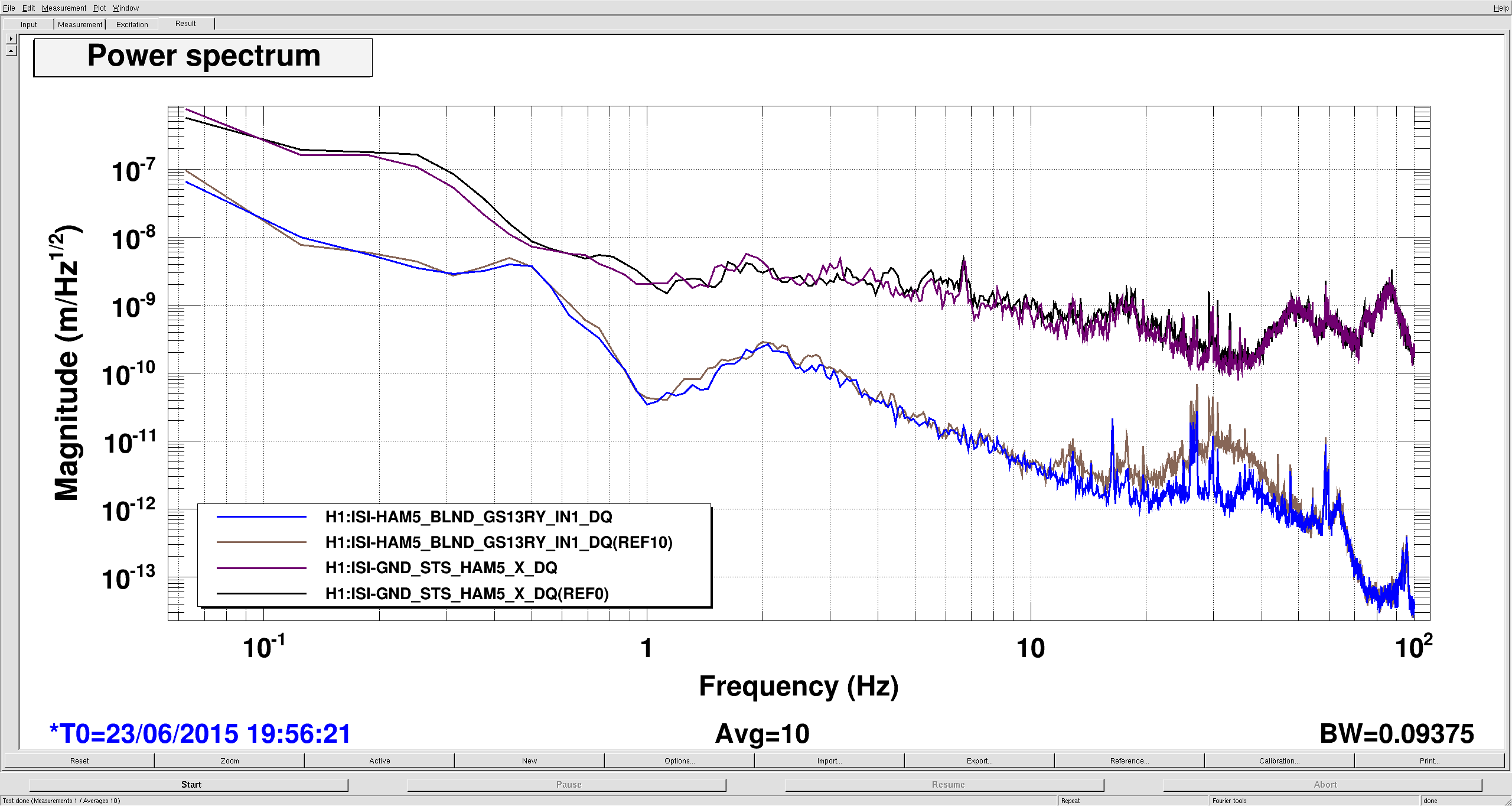
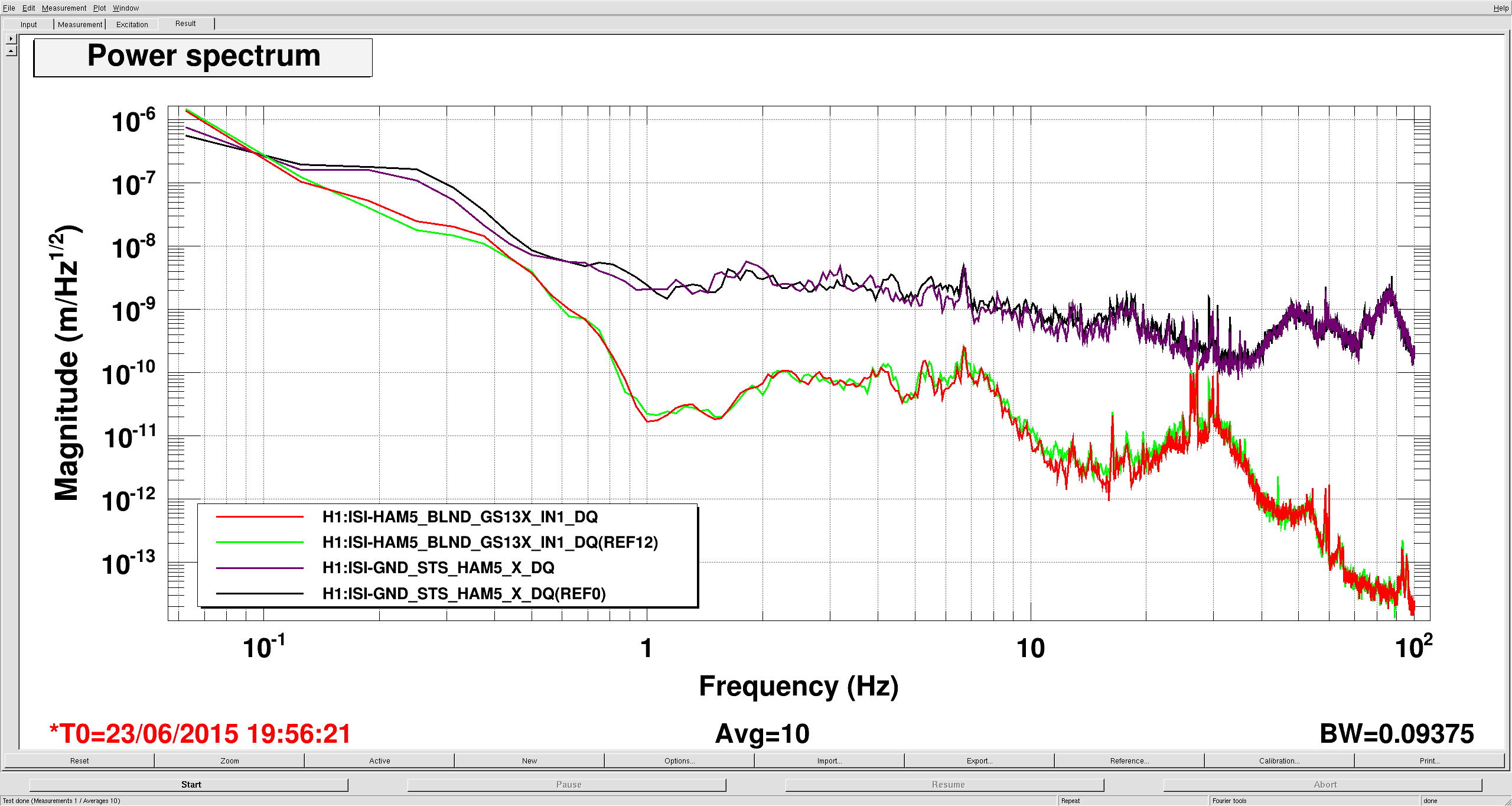
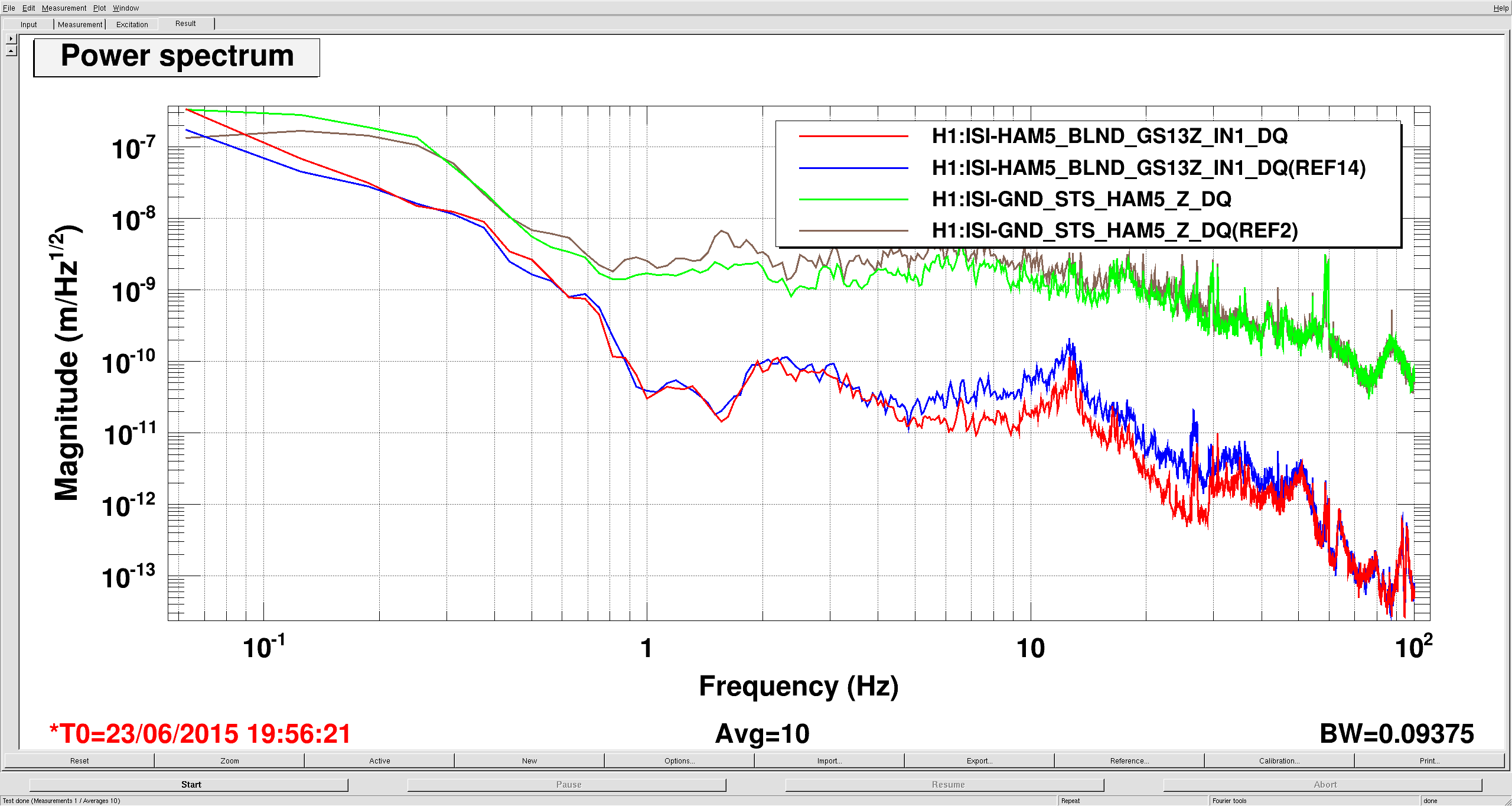
In an email conversation Norna had asked what we could do to reduce motion on the HAM's in the RX/RY dofs at 25-35 hz. This morning I took a few measurements to design a FF filter. I've taken a first pass at it and I think I have something that works. Attached spectra are of the ground STS X and GS13s in RY the first png, then both sensors in X on the second plot. The live measurements are with FF on, references are from a quiet time last night, FF off.
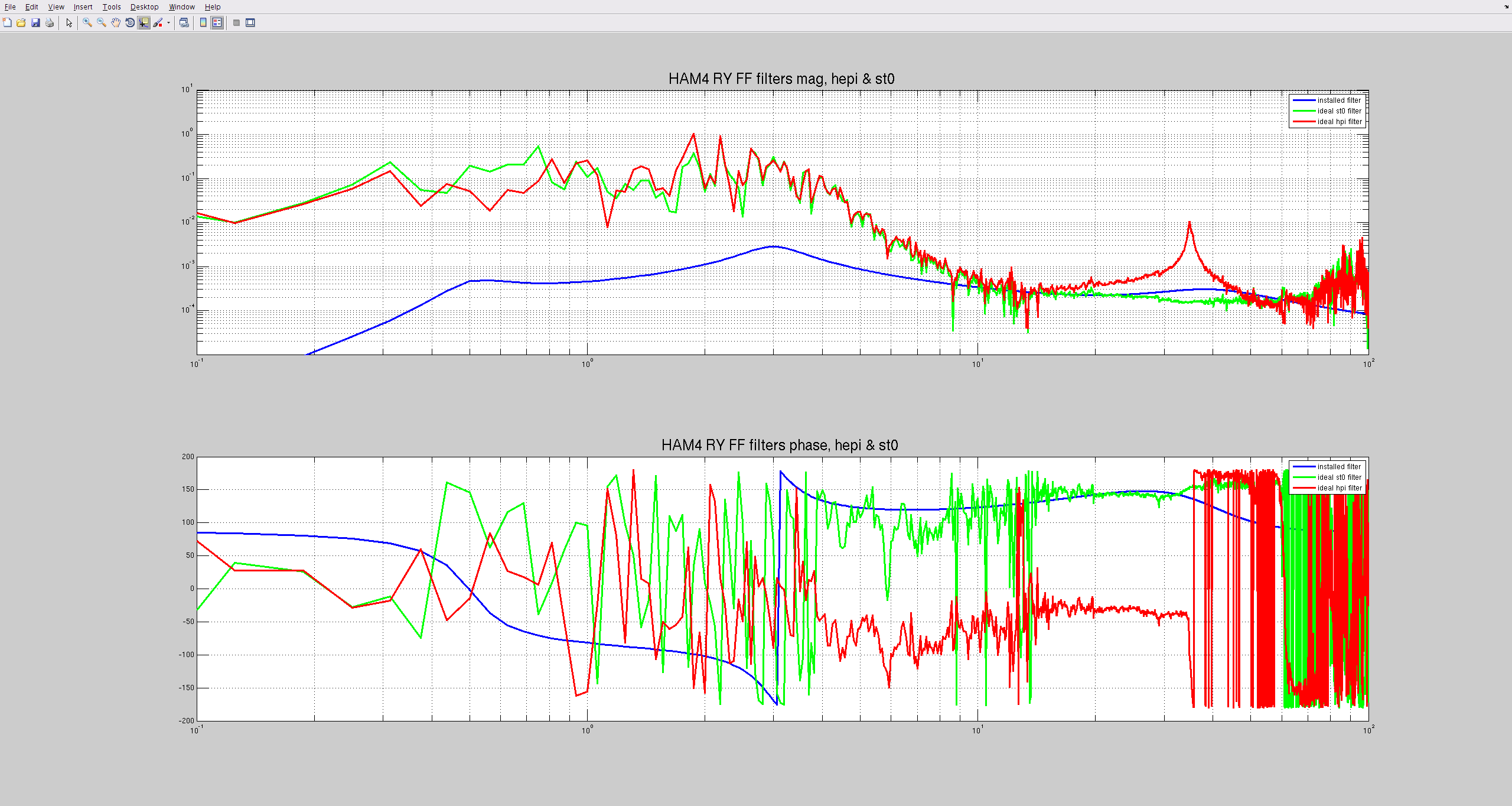
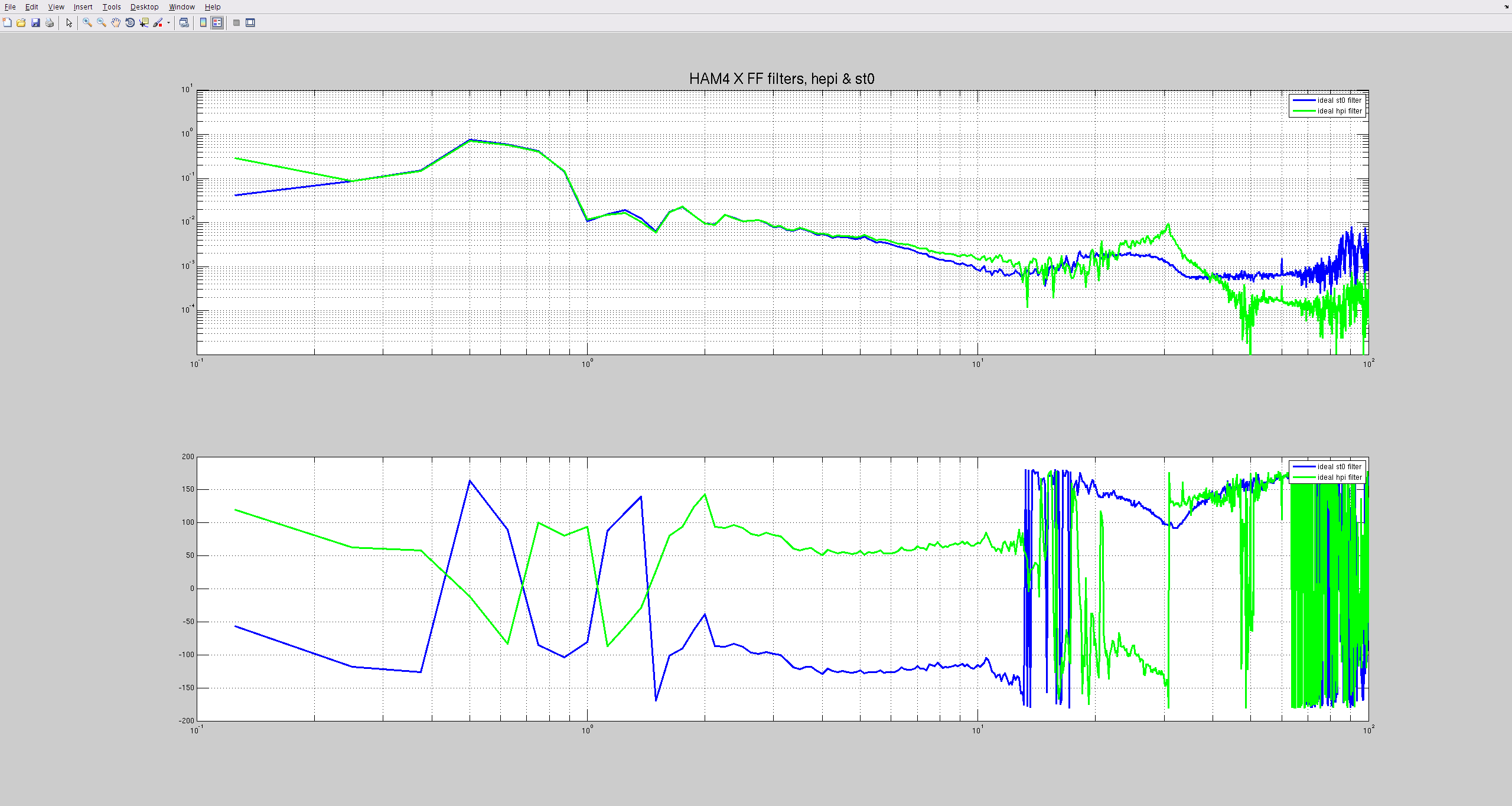
The third attachment is a plot from the script I used to do the filter fit. Blue is the filter, green is the ideal fit from the St0 L4C's to the ISI GS13's, red is the fit from the HEPI L4C's to the ISI. The design approach is exactly the same as I talked about in my alog 18045.
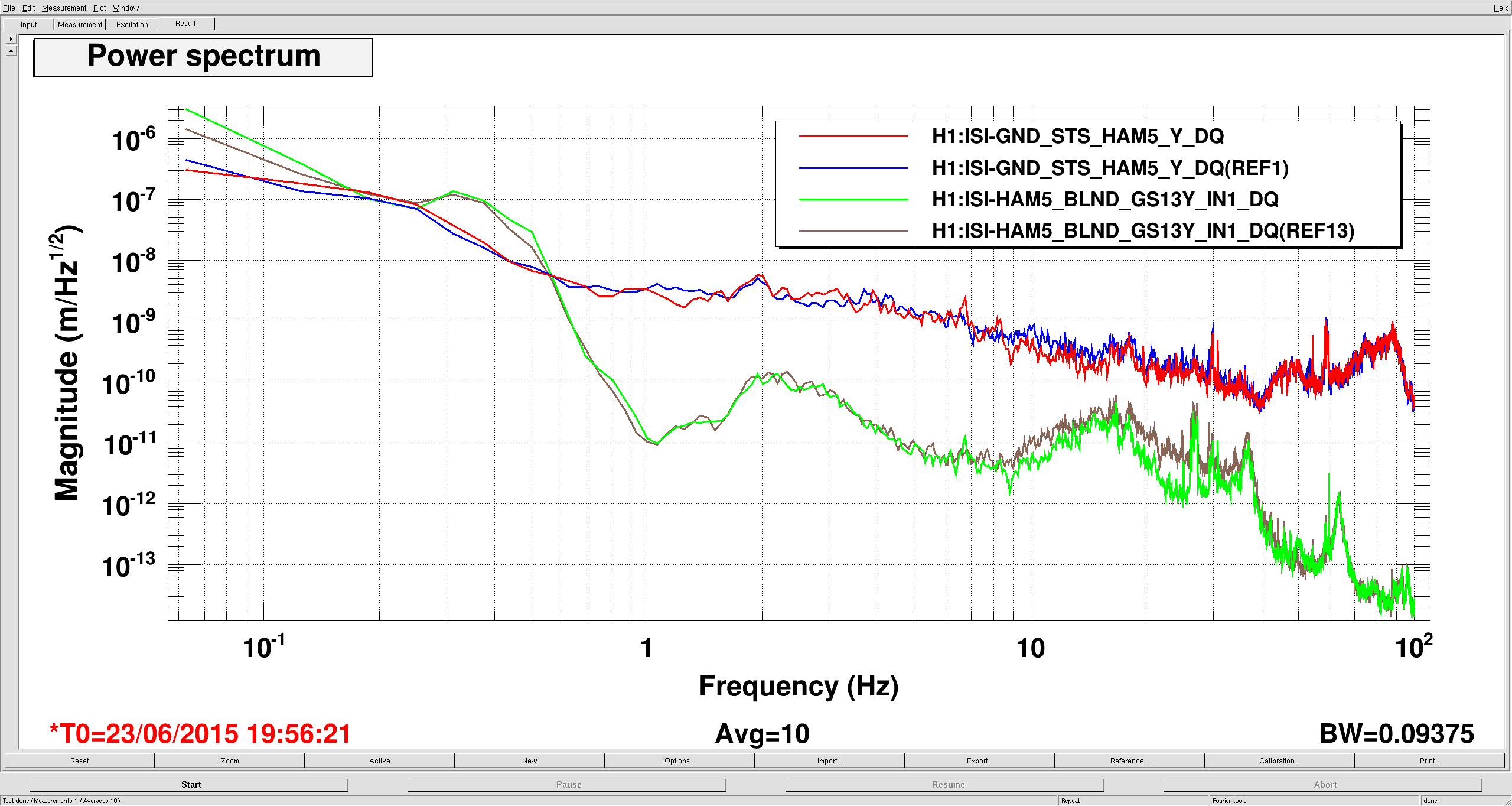
I also have Y and Z feedforward working on the SRC HAMs. I attach performance plots (taken at the same time as the plots from my main post). These have been running on HAM4 for a little while (sometime after ER7 ended), but I never got around to doing the alog and I was a little more organized when I installed them on HAM5 today. First plot is Y, second is Z. Active measurement is with FF on, reference is FF off. Again, we really need a cavity to say if these are good enough, but I leave them running for now.
I've looked at X, RX and RZ, but RX and RZ show low coherence and X looks... messy, see last plot.
That was quick! Looking good. Thanks.
J. Kissel, J. Warner Some additional information and/or a "current status:" ISIs HAM2 and HAM3 do not have any ST0 / HEPI L4C feed-forward running. ISIs HAM4 and HAM5 have Y, Z, and RY ST0 L4C (not HEPI L4C) feed-forward running. (HAM6 is currently vented and the ISI and HEPI are locked.) The HAM4 and HAM5 filters, for Y, Z, and RY live in FMs 2, 3, and 4 respectively. The gain for all DOFs on both HAMs is 0.5. Norna's designing / modelling how adding blades between the HSTS's lowest stages will improve performance in the SUS's vertical displacement. The input motion for the SUS's suspension point in vertical is composed of the ISI's center of mass moving in Z, RX, and RY (see T1100617). She noticed from the results Jim posted (T1500289), that at 25-30 [Hz], the input V motion was dominated by RX / RY of the table. So, among other ways to improve the performance at these frequencies (see them discussed in SWG aLOG 11327), Jim tried improving the RY DOFs today -- and won! Nice work, as always, Jim!
There was a problem with HAM5 at the time I took this data. I've taken new measurements from HAM4, see alog 19343. Conclusions remains the same, I think, but the data is cleaner.