stefan.ballmer@LIGO.ORG - posted 21:27, Saturday 11 July 2015 - last comment - 20:04, Sunday 12 July 2015(19572)
AS_A_36 phasing
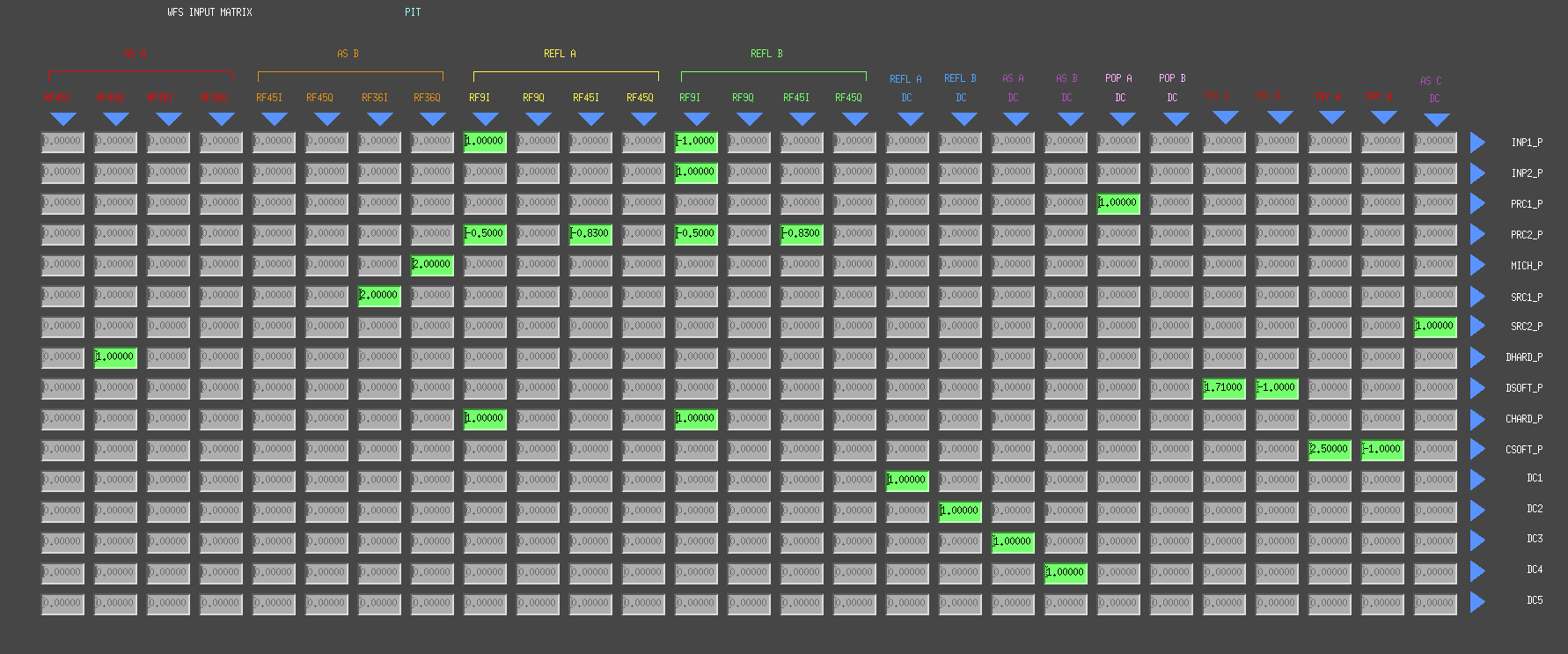
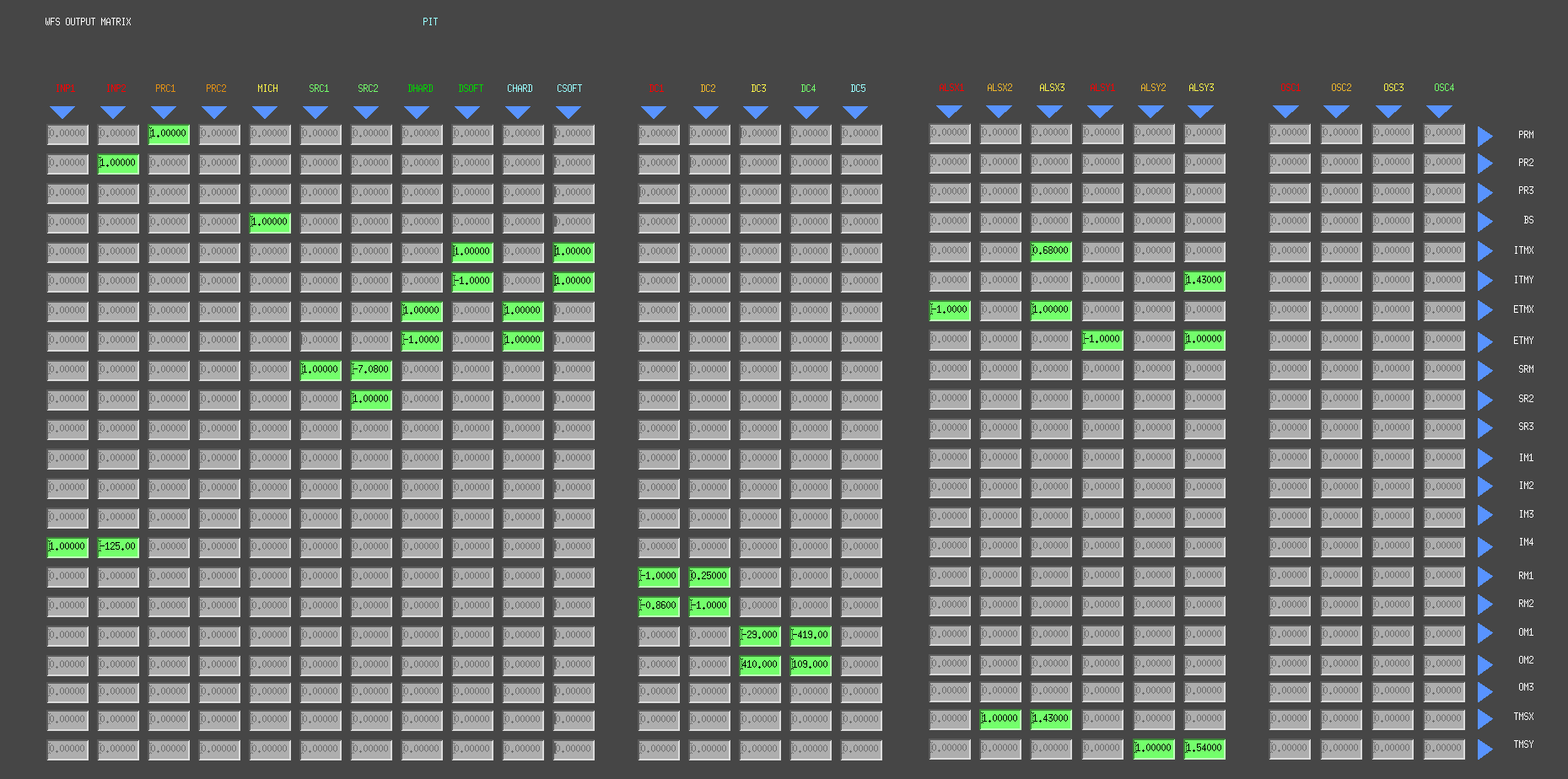
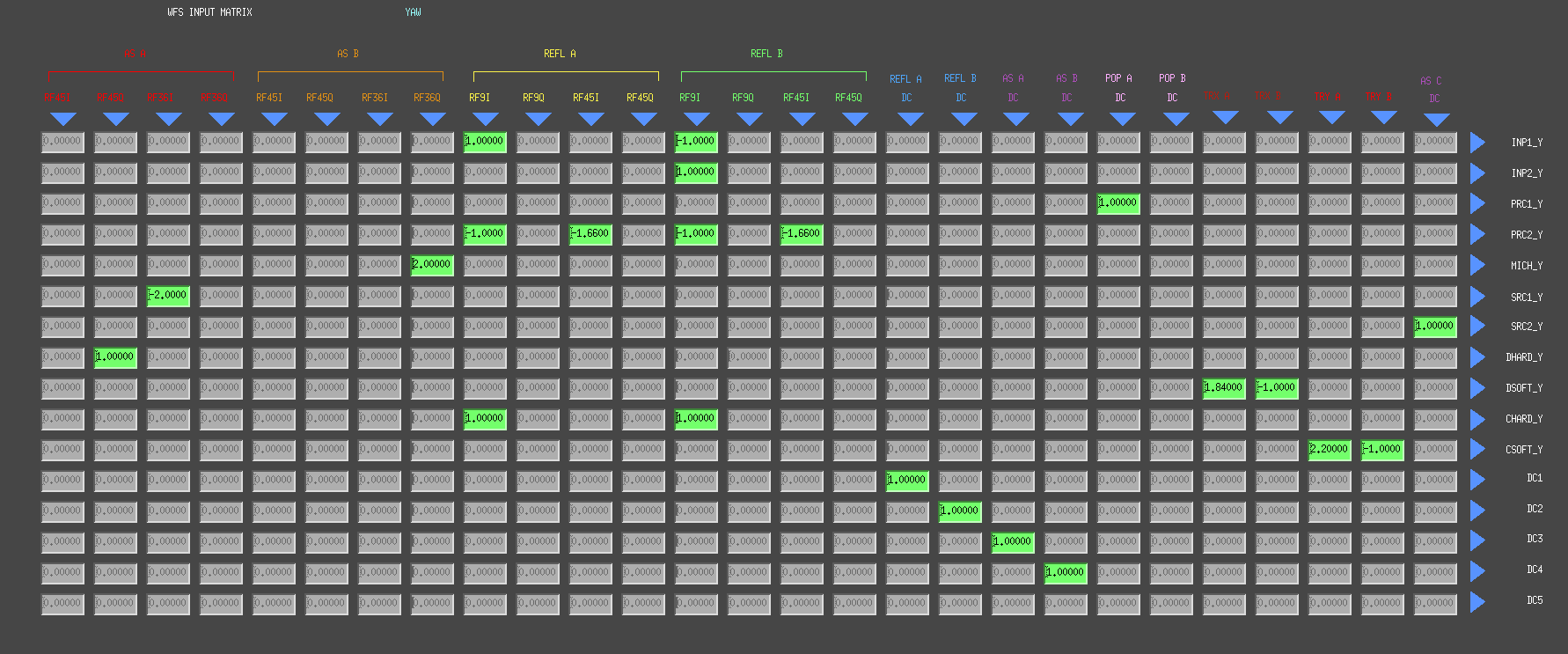
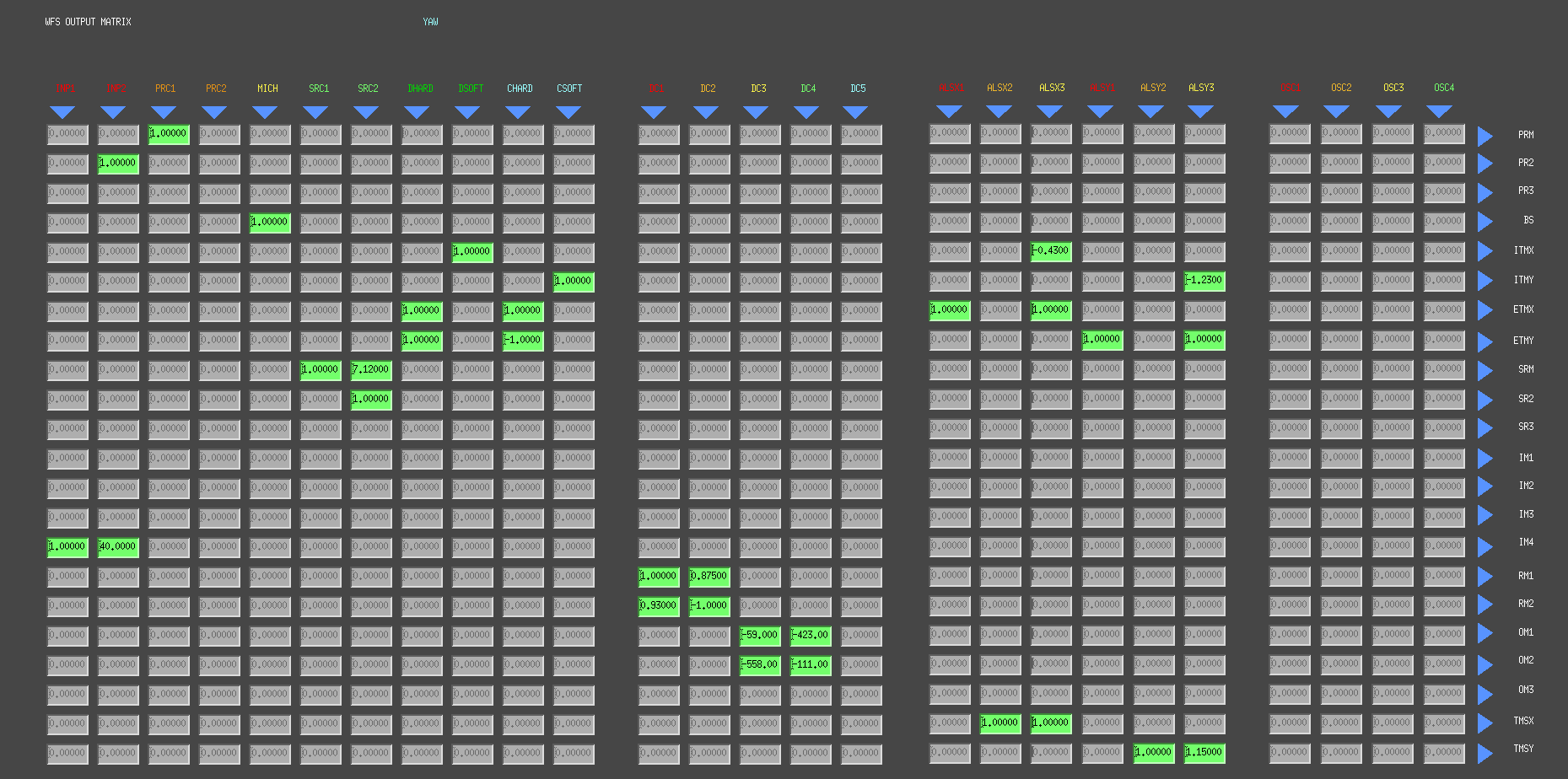
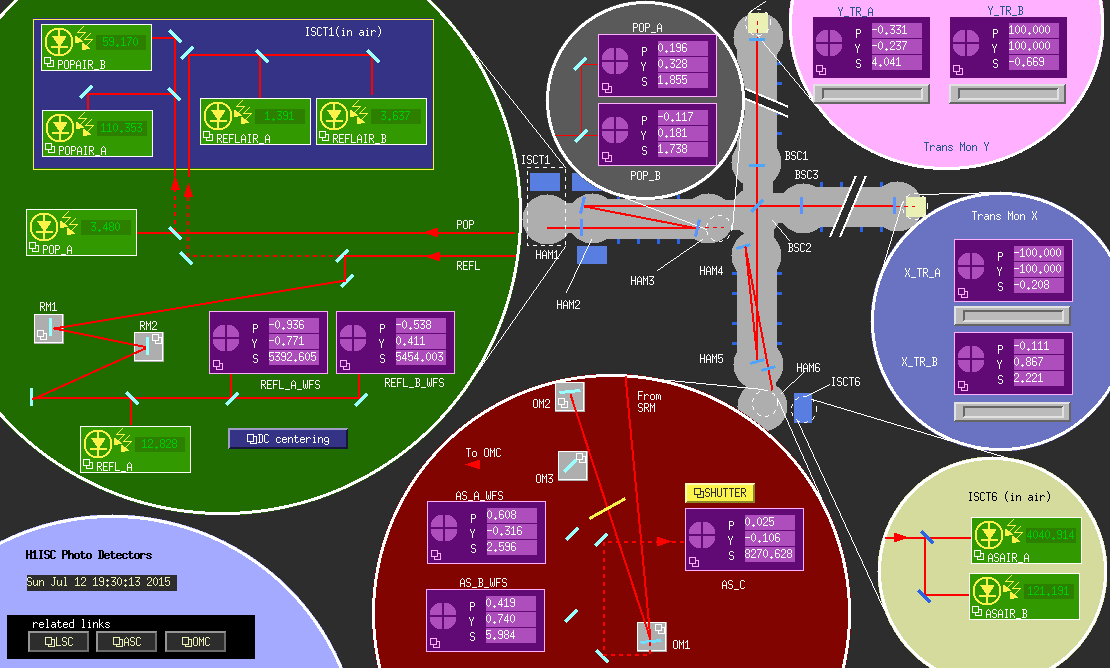
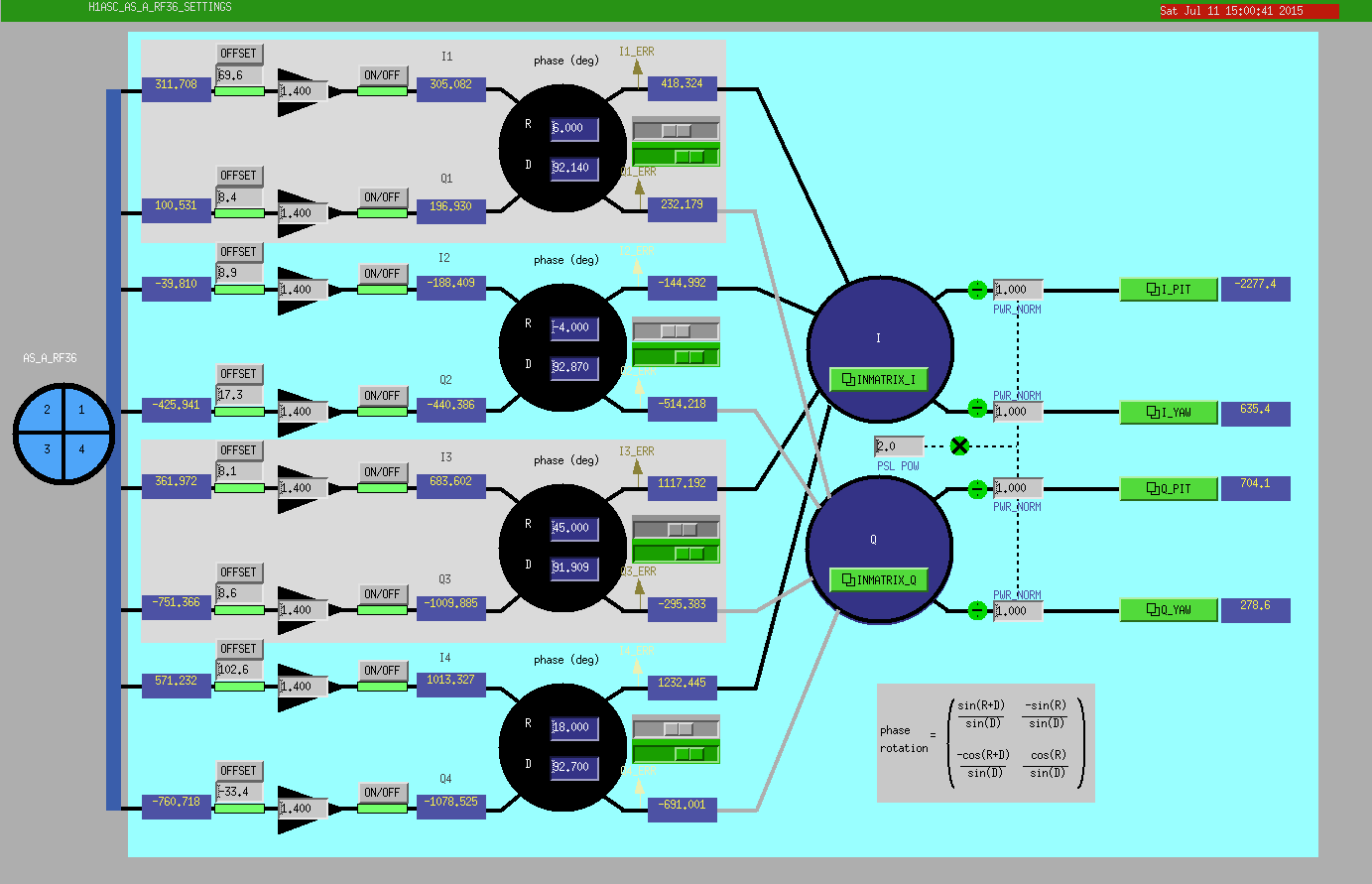
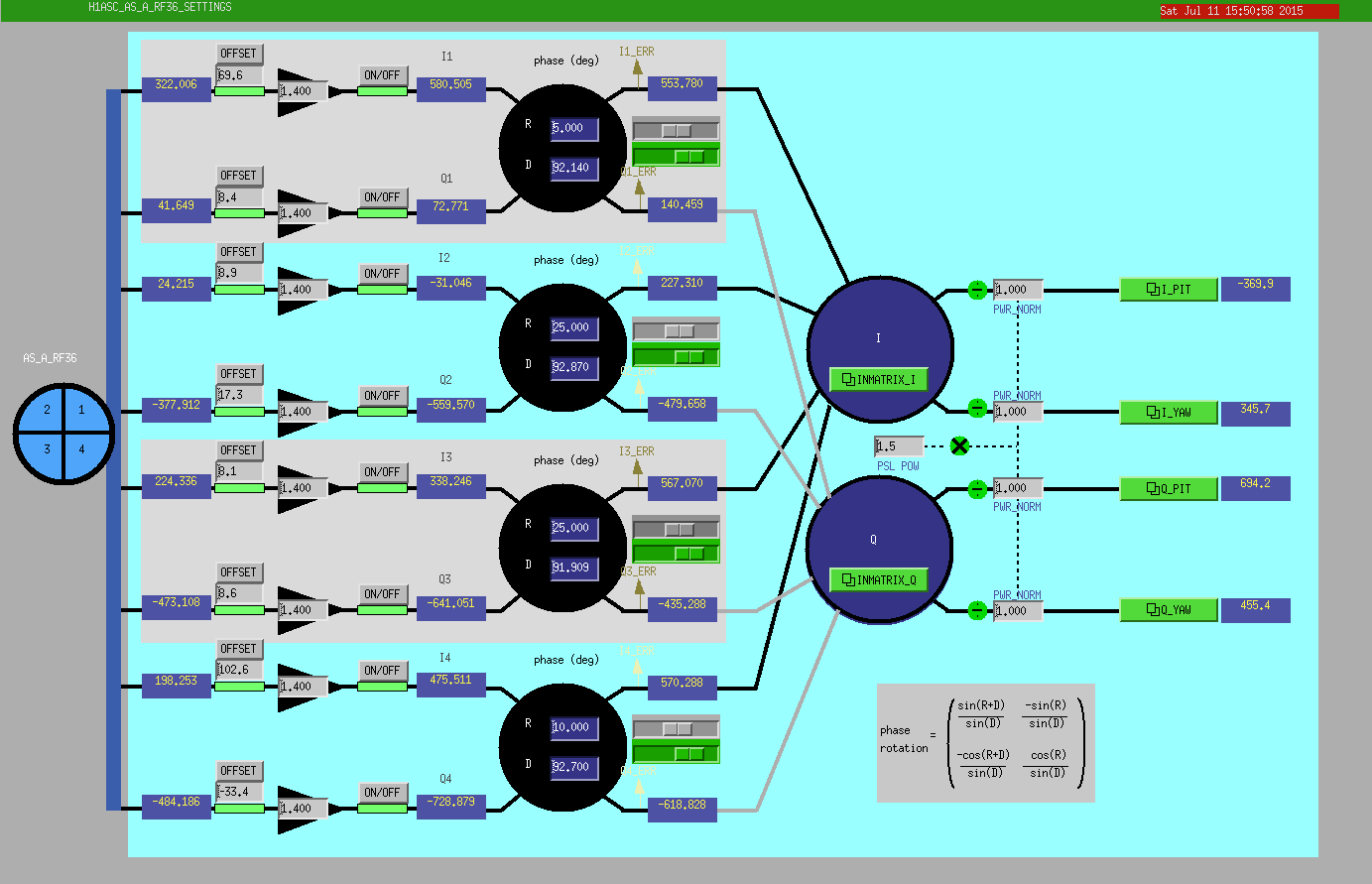
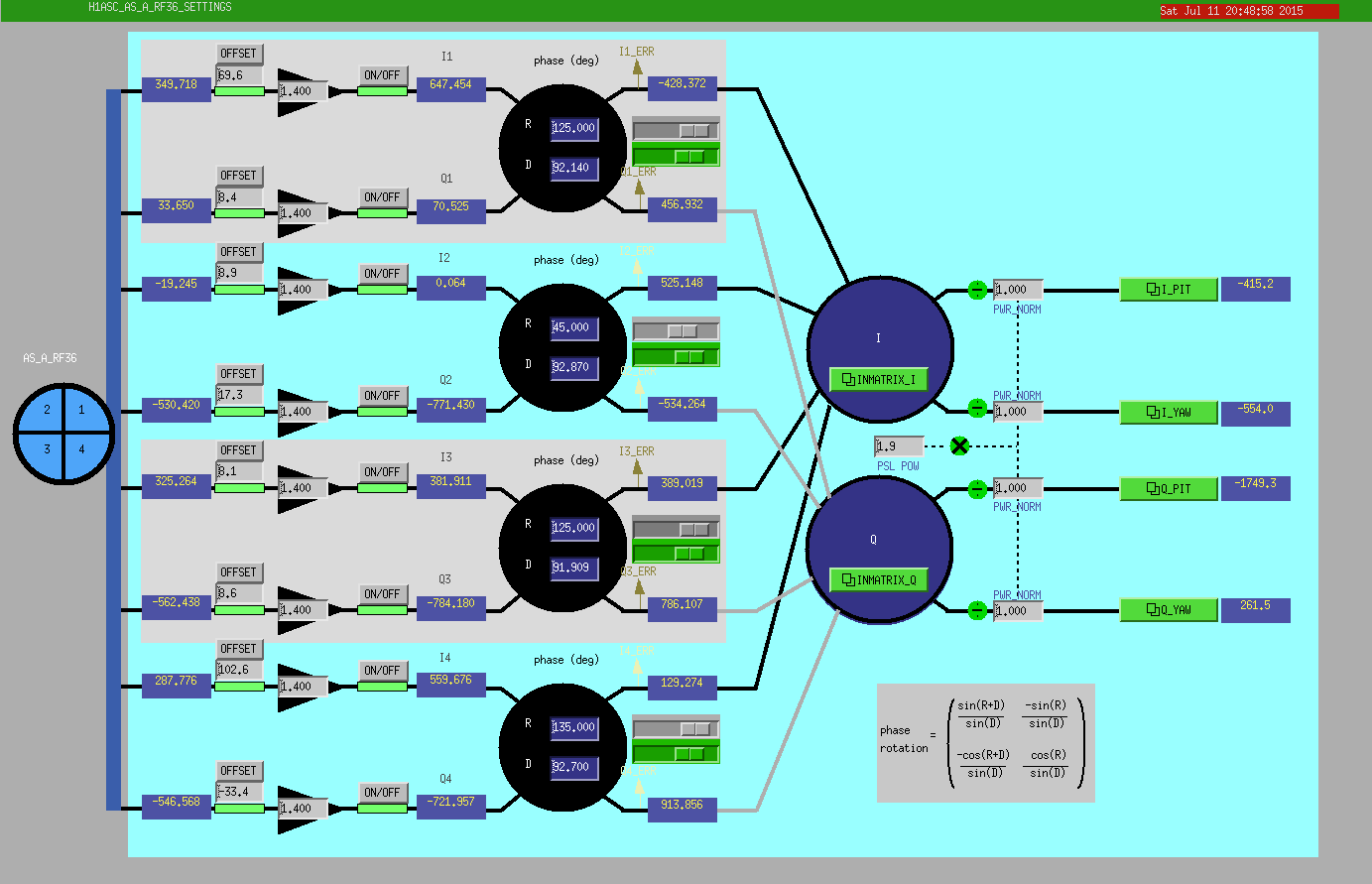
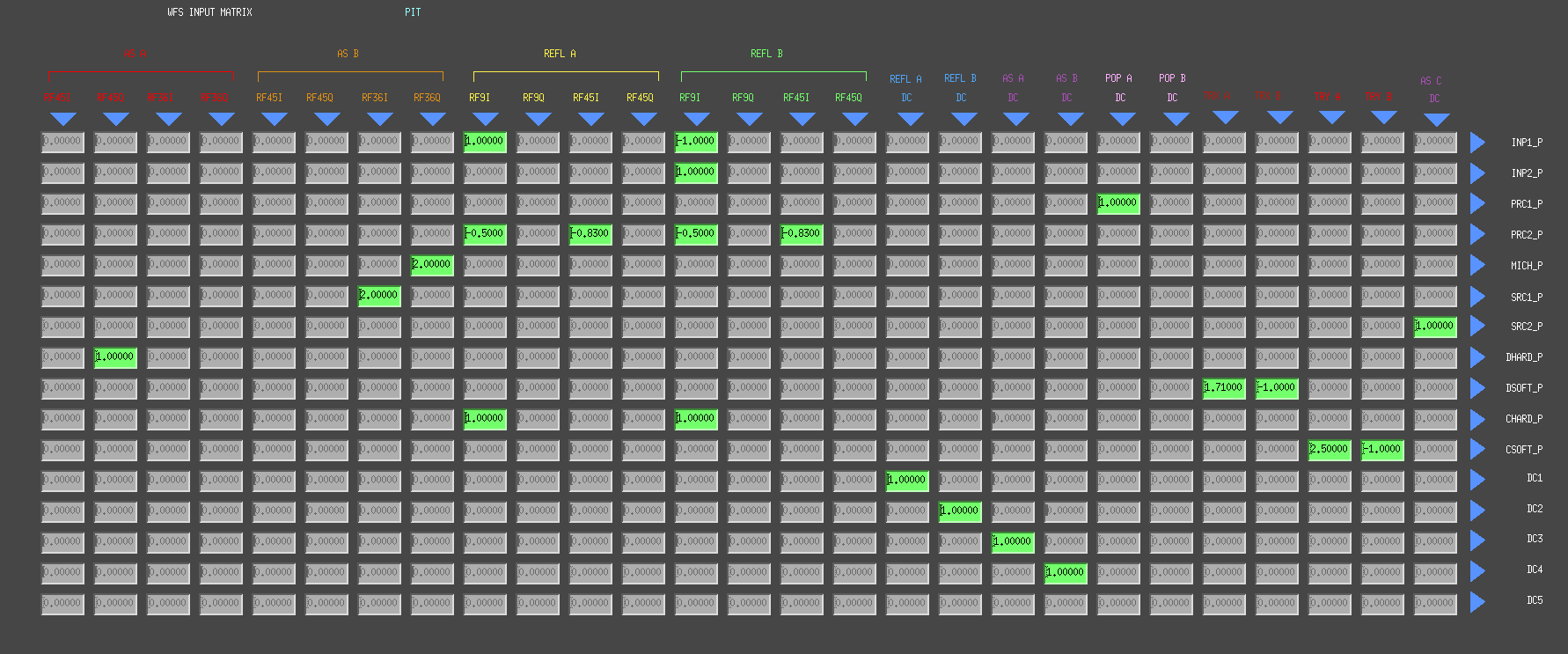
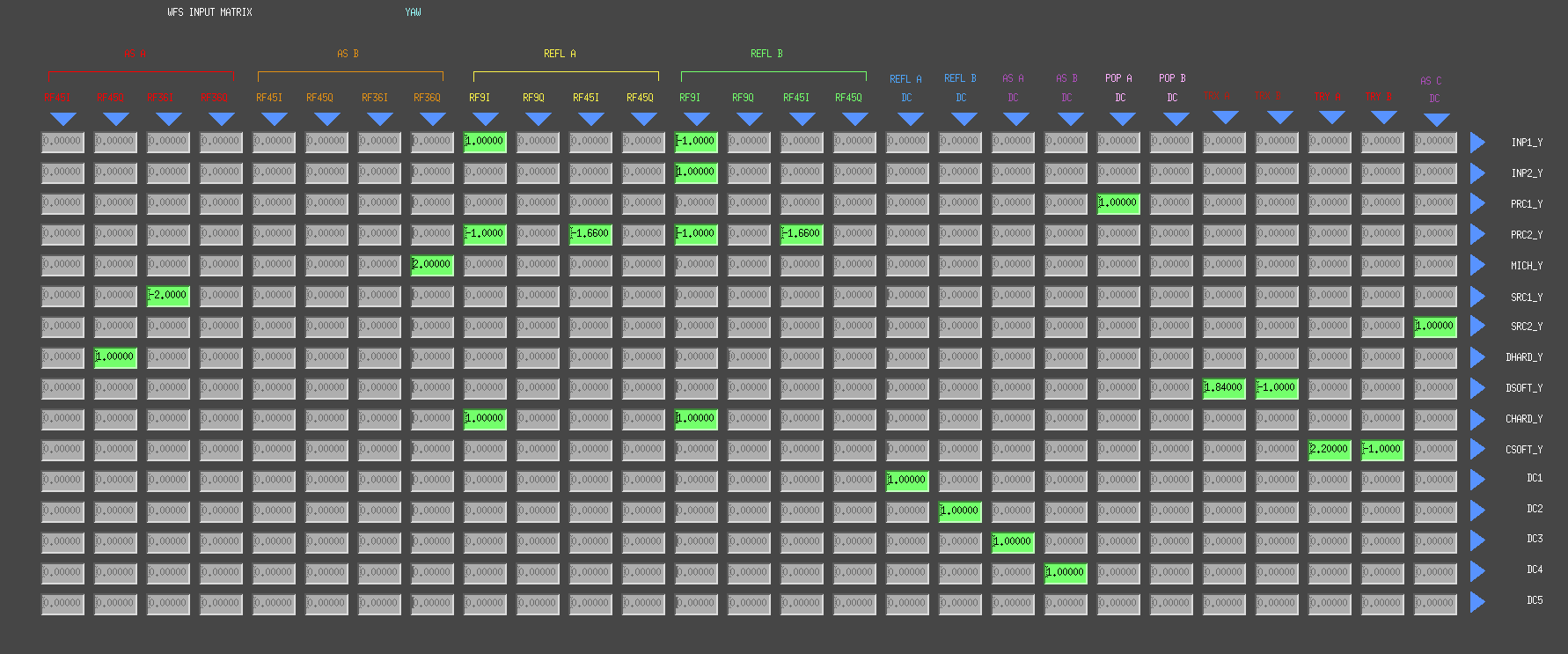
Evan, Stefan When we came in the winds were relatively high, so we decided to take another loock at the AS_A_36 phasing. We did so in DRMI. - To take out the effect of WFS centering and the otherASC loops, we lowered the total ASC gain by a factor 10, and increased the WFS centering gain from 1 to 200 (raising the centering gain by a factor of 20). - We then drove the SRM at 0.3Hz in PIT and YAW. - Interestingly PIT and YAW totaly disagree on the phase, by about 125deg... - Attached are screen shots for the old phases (picture 1), phased for PIT (picture 2), and phased for YAW (picture 3) - Additionally, while all 4 quadrants show a reasonable signal for PIT, the YAW signal is weak in quadrant 1 and not present in quadrant 2 - We decided to make a pragmatic choice: - For PIT AS_B_36_I is already a fine signal - only for YAW it doesn't work - Thus we decided to phase AS_A_36_I for YAW... - ... and only use quadrants 3 and 4 (the lower two quadrants). - Quadrants 3 & 4 also have a similar strength signal (with opposite sign) and similar RF offset (with the same sign) - So: this new YAW signal AS_A_36_I should be fine now. YAW Input matrix for I and Q now is: H1:ASC-AS_A_RF36_I_MTRX_2_1 0 H1:ASC-AS_A_RF36_I_MTRX_2_2 0 H1:ASC-AS_A_RF36_I_MTRX_2_3 -2 H1:ASC-AS_A_RF36_I_MTRX_2_4 2 With this new YAW sensor we updated the ASC sensing matrix (pictures 3 and 4). This sensor seemed to do a good job at 17W and at 24W. However at 24W we still saw a 0.4Hz instability - see next alog.
Images attached to this report
Comments related to this report
Some more screen shots
Images attached to this comment