stefan.ballmer@LIGO.ORG - posted 13:10, Saturday 12 September 2015 - last comment - 17:26, Saturday 12 September 2015(21435)
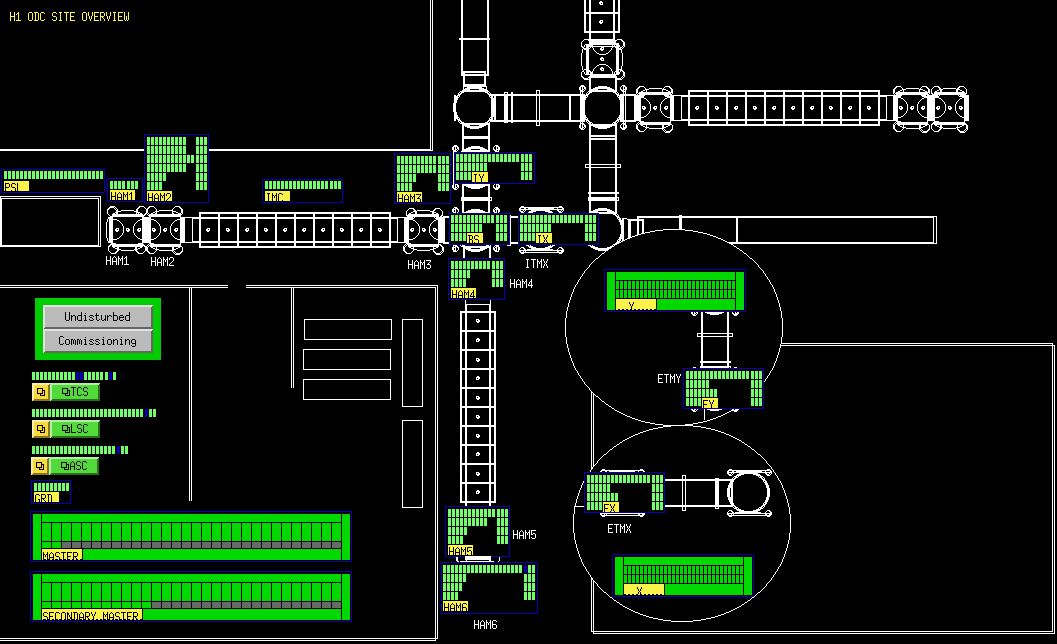
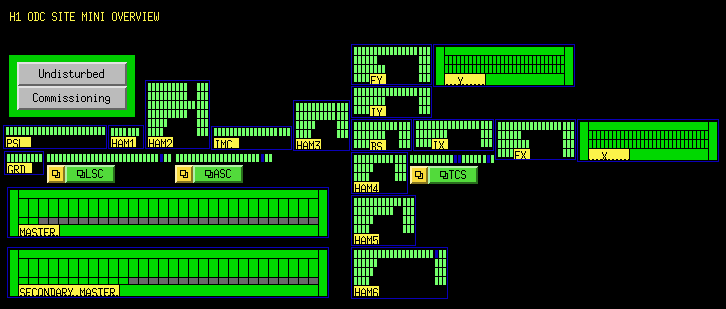
ODC housekeeping
IM4 QPD, lower 2 quadrants were saturating - lowered their whitening gain by 9dB from 36dB to 27dB (gain value from 12 to 9) IM4 is not in any loop, so no impact on feed-back. Before clicking undisturbed, we updated some ODC settings: - default ODC filter mask were set for PRM, SRM, SR3, ETMX and ETMYY - took out LSC and ASC party check from MASTER mask (the party from those models is not reported correctly, see alog 20936) - all changes are in SDF - additionally updated the ASC ODC transmon alarm thresholds form 0.2 (Xarm) and 0.3 (Yarm) to to 0.7 at 20:02 UTC - the intent bit was unset for 2 min,. but the data is unaffected. Note that H1:ASC-Y_TR_B_YAW_OUTPUT had drifted all the way up to -0.55 - presumably due to TMS drift. We are using -1.1*TRY_A_YAW + 0.5*TRY_B_YAW for servoing, because this independent of TMS drift. Of course, if we move enough that we fall off one diode, that's no longer true. We should keep an eye on that. - all changes are in SDF
Comments related to this report
Images attached to this comment