jeffrey.kissel@LIGO.ORG - posted 22:23, Wednesday 30 September 2015 - last comment - 22:44, Wednesday 30 September 2015(22135)
The Case For and Consequences of Flipping the ESD Bias on H1 ETMY
J. Kissel, B. Weaver
This aLOG serves more as a discussion of recent results and future impact, but I figure the aLOG is the most visible place to cover a message that needs discussion among many disparate groups. I discuss the latest evidence for charge evolution on the H1 ETMY test mass, why it matters for that test mass alone, and what it will impact when we do change it (especially in regards to calibration). Conclusions are in bold at the bottom of each section.
----------------
Why I think it's looming:
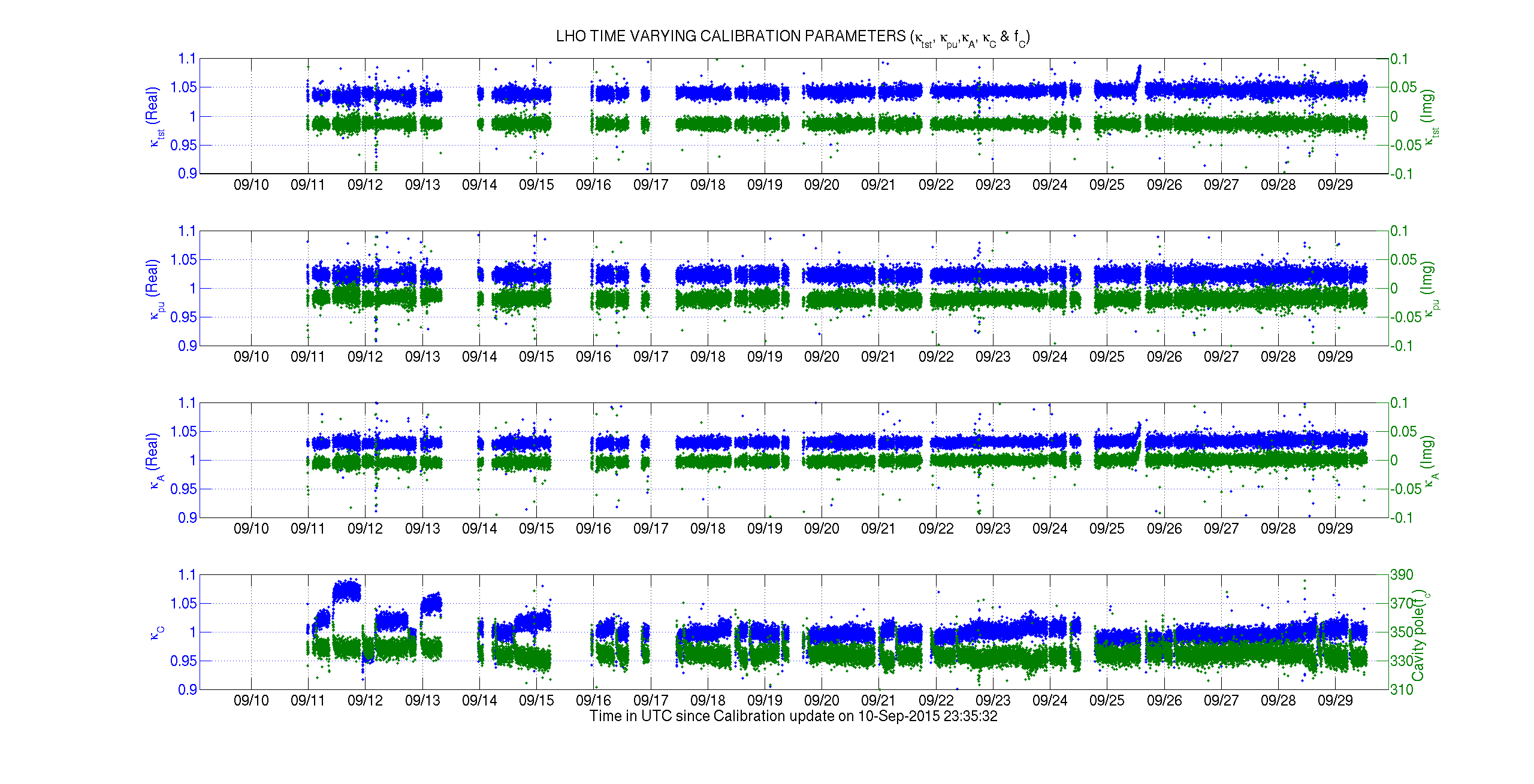
:: kappa_TST is the calibration group's measure of the change in actuation strength of the test mass stage as a function of time, and since H1 ETMY is the only DARM actuator, it's showing that the H1 ETMY ESD / TST / L3 stage's strength has increased. kappa_TST has shown an increase in actuation strength in ~3 [weeks] of a ~2%: See blue trace in the top subplot of the first attachment. (copied from LHO aLOG 22082).
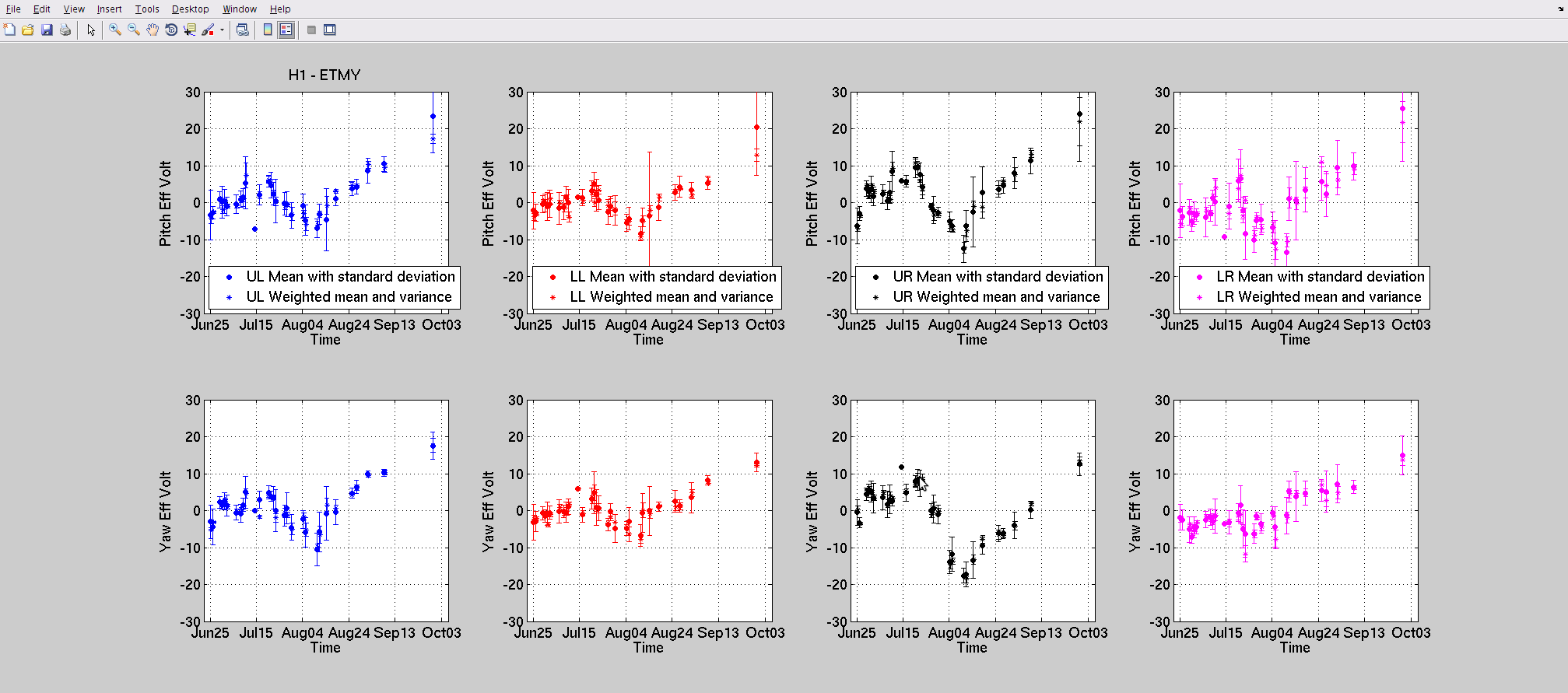
:: H1 ETMY is showing steadily increasing charge since we've last flipped the ESD bias, as expected: See the trend in all subplots of the second attachment (copied from LHO aLOG 22062).
> Recall that actuation strength changes as a function of charge, proportional to the ratio of effective bias voltage from charge to the bias voltage we apply intentionally, Vc / Vb.
> Regrettably, we've measured the charge so infrequently since the start of the run, that it's dicey to corroborate between charge and actuation strength. But I'll try anyway. If you take Betsy's last and second to last charge measurement points, which are bounding Sudarshan's kappa_TST time span, you can eyeball that the change is 15 [V] effective bias. This means an actuation strength change of 15 / 380 = 4%. Given the error bars on the charge measurements and how few measurements we've had, is totally consistent with the ~2% change seen by tracking the calibration lines. Also, if we increase the effective bias voltage from charge, on an already positive bias, then than you're increasing the bias voltage, which is consistent with an increase in actuation strength, since the linear component of the actuation force is proportional to the bias voltage.
> The current rate of change of ETMY is ~3V / week. But also recall that the rate of change has *changed* every time we've flipped the bias; see Leo's analysis in LHO aLOG 20387 which (for ETMY) quotes 1.75V / week for one epoch and 5V / week for the next. So it's going to be subjective when we flip the bias sign, and we have to keep close tabs on it, especially since the error bars on an individual day's measurement require many data points to show a pattern. However, the evidence up to now suggests that even though a bias sign flip changes the rate, it stays at a constant until the bias sign is flipped again.
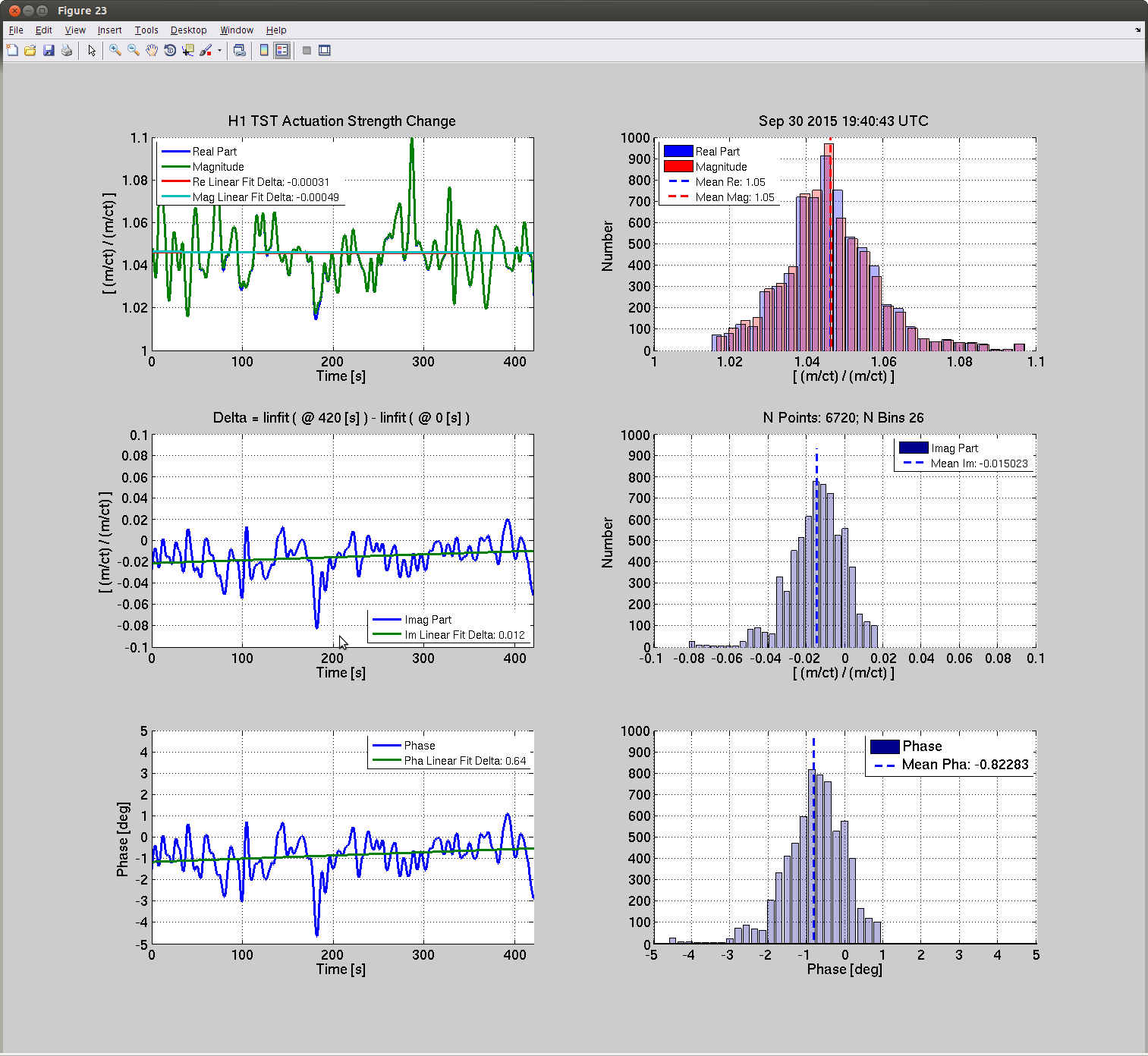
:: The calibration group -- now that we finally have removed all systematic errors, fixed all problems, and cleaned up all sign confusion -- finally believe that the live-tracking of this slow time dependence is working, and is tracking the real thing as far as these very long term trends (see first attachment again). But we have not yet started applying them, because we haven't figured out the right *time scale* upon which to apply them, and applying them takes some debugging. See the third attachment (this is new). These time dependent parameters are being computed at a rate of 16 [Hz], but if you look at say, one 420 [sec] chunk, the record wanders all over within a roughly +/-3% swing on a ~10 [sec] cadence. We have no evidence to believe this the test mass actuation strength is changing this fast, so this is likely noise. So at this point, unless we're willing to lose a day or so of data (i.e. enough lock stretches where can get a sense of a pattern) where we're testing out, I don't think we *can* start correcting for these factors
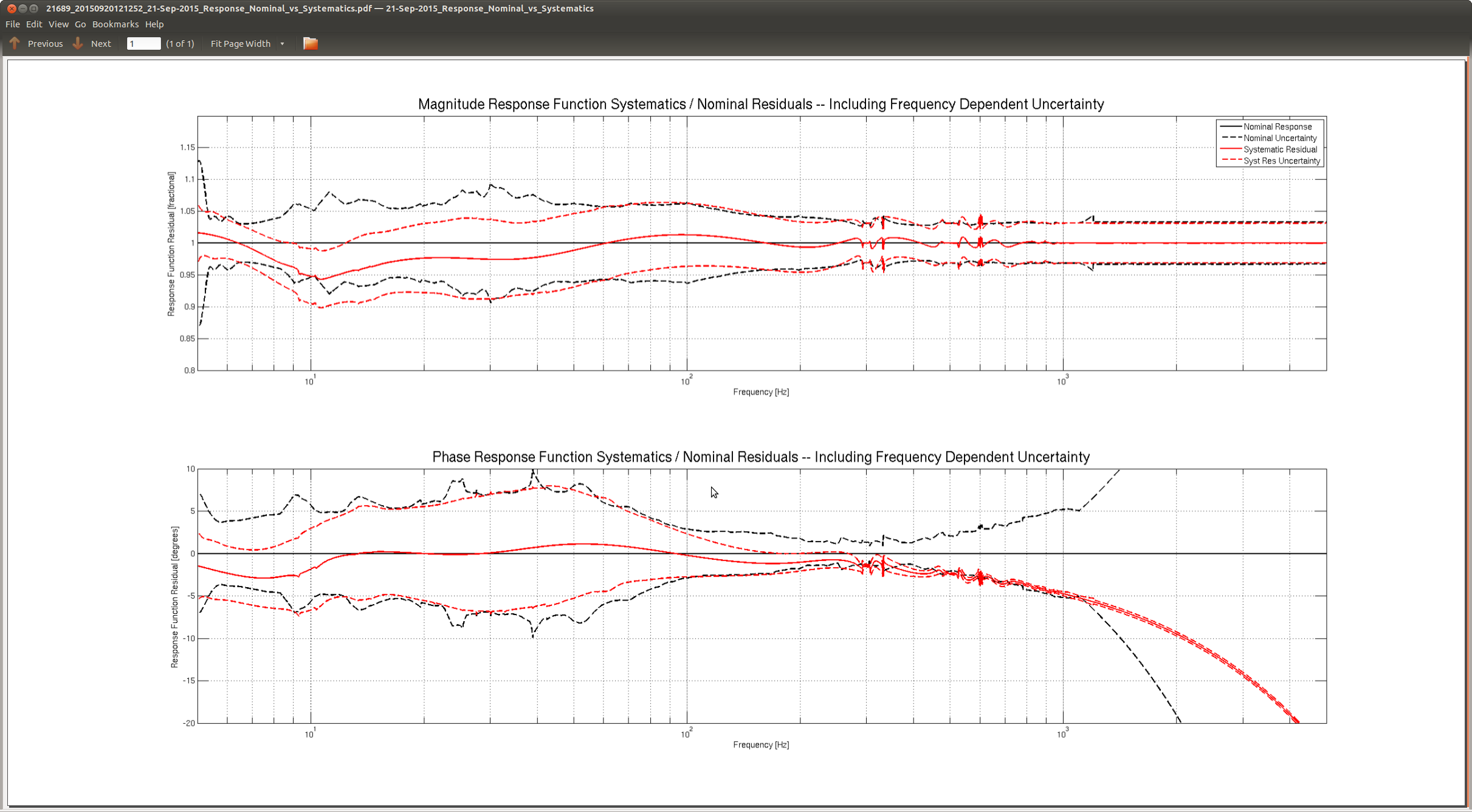
:: The calibration group's requirement is to stay within a 10% and 5 [deg] uncertainty over the course of the entire run. We already know from Craig's uncertainty analysis of ER8 (see fourth attachment, copied from LHO aLOG 21689), that -- without including time-dependence -- the reference time model (in reference to which all time-dependent parameters are calculated), has an uncertainty of 5% and a little more that 5 [deg]. The change in actuation strength means that we'll have a systematic error that grows with time, and since we're fighting for what's left of the 10% uncertainty budget, this changein actuation strength that we've tracked over these first three weeks of the run of 2-3% are significant.
:: If we let the charge continue to gather at its current rate, that means we'll gather an additional 11 more weeks, that means another ~35 [V], for a total accumulated charge of 60 [V], and a total actuation strength change of 60 / 380 = 15%, which is *well* outside of our budget.
In summary, we're going to need to change the bias on H1 ETMY sign soon.
-------------------
What will be impacted when we change it:
:: First, foremost, and easiest, when we change the digital bias sign, it changes the sign of the test mass actuation stage. That means we have to compensate for it in order for the DARM loop to remain stable. That means we change the sign of the gain in the L3 DRIVEALIGN bank, i.e. H1:SUS-ETMY_L3_DRIVEALIGN_L2L_GAIN. Done. easy.
:: Now on to the hard stuff -- making sure it doesn't affect the calibration.
In the CAL-CS replication of the reference model of the DARM loop is the obvious first impact
> Of course, we need to flip sign of the digital replica of the drive align matrix, H1:CAL-CS_DARM_FE_ETMY_L3_DRIVEALIGN_L2L_GAIN
> We also need to flip the sign of the replica of the ESD itself, H1:CAL-CS_DARM_ANALOG_ETMY_L3_GAIN
:: The not-so obvious impact is on the tracking of the actuation strength. Because the ESD / TST / L3 calibration line is injected downstream of the DARM distribution, but upstream of the drive-align bank, the sign of the analysis code must change. We've already been bitten by this once -- see LHO aLOG 21601
> That means we need to update the EPICs records that capture the reference model values at the calibration line frequencies
> *That* means we need to create a new DARM model parameters set, which also maps all of the changes to ESD / TST / L3 sign change (just like CAL-CS)
> *THAT* means we ought to take a new DARM Open Loop Gain and PCAL to DARM TF, to verify that the parameter set is valid.
> *THAT* means we need a fully functional and undisturbed IFO (i.e. this can't just be done on a Tuesday, or as a "target of oppurtunity" when L1 is down), *after* the sign flip that we're will to take out of observation mode for an hour or so
:: Once we have a new, validated model, then we push the new EPICs records into the CAL-CS model, and everything that needs updating should be complete.
:: There's then the "offline" work of updating the SDF system -- but this must be done quickly because it prevents you from setting the observation intent bit. For these particular records which have very small numbers, there're precision issues that means you must hand-edit the .snap files (see, e.g. LHO aLOGs 22079, LHO aLOG 22065, 21014), which is another hour of time, instead of just hitting "accept all" and "confirm" in the SDF GUI interface like any other record.
In summary If we are properly prepared for this, and everyone is on deck ready for it, I think this all can be done in a (human, but very long, human) day, especially if we have a *team* of dedicated calibrators, detector engineers, and some commissioning support. Further It's not a "just do it on a Tuesday" or "just do it target of oppurtunity when L1 is down" kind of task and should each of the above steps should be done slowly and methodically.
Also, I should say that is room for improvement in just about every part of this bias sign flipping process, but all of those would require non-science run friendly changes to front-end code, RCG infrastructure, and a good bit of time commissioning.
Images attached to this report
Comments related to this report
Why isn't this an issue with any of the other test masses? Both site's ETMX's ESD drivers are turned entirely off during low-noise operation, so they have no impact on noise or actuation strength. For lock acquisition, At H1, ETMX is used, but whether the ETMX acqusition ESD has a 10-20% change in actuation strength over the course of the run does not matter for calibration or lock acquisition. Regrettably H1 ETMX bias is currently negative, so its current trend of positive charge means that actuation strength will be decreasing over the run. But, again, a 10-20% drop in strength won't matter. The only place where I could see us run into trouble is whereever we're on the edge of stability / robustness, like acquiring during very high winds, or if we've designed the L3/L1 ALS DIFF cross-over particularly agressively (which I hope we have not). At L1, they've recently switched to using ETMY for lock acquisition, then transitioning to their *ITMX* driver, switching the ETMY driver to low noise, and then transisition back. So only their ETMY ESD strength matters. And, goh'bless'm, they flipped their bias sign *just* before the run started with the charge a -40 [v] effective bias, so they'll have enough time at their current rate charging positive ~10 V/month, or 2.5 V / week then to go through zero right around the end of the run. That means the impact of this on their actuation strength will be slowly reducing over time. At H1, the ITMs do not have any ESD drivers (high or low voltage), so they also need no consideration. At L1, only ITMX has an ESD driver, but again, it's currently used in transit to low noise, so it doesn't play a role in calibration, and assuming the loops were designed with ample margin, a 10-20% change in actuation strength shouldn't be a bother. In summary H1 ETMY is the only test mass where we will ne to play such terrible games during O1.