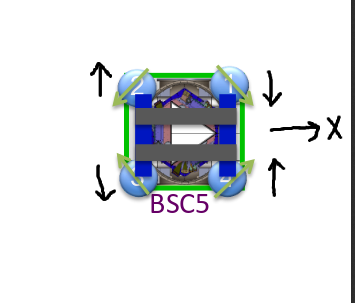
When an SEI platform trips and then relocks, there is DC control to zero the error point stearing to a fixed position. Not all ISI platforms/dofs do this but for HEPI, all platforms and all DOFs servo to the 'reference location', except, the pringles modes. These are the potato chip like distortions required to allow the other 'standard' cartesian dofs to be realised given the physics of the hardware. As an example, the four horizontal actuators on a HEPI platform are all situated at 45 degrees to the X & Y direction. For RZ, you can picture that you push or pull on the 4 actuators to easily get RZ (Yaw.) But consider X or Y, to move in X, the 2 far actuators will squeeze the Y dof together and the near actuators will push the Y apart. See the Attached for a visual of a BSC (G1000125.) The green arrows represent the signed directions of the local Actuator coordinates. Maybe better said, to achieve a motion in X, a movement in the Y component must occur. This 'distortion' is what is measured by the Pringle mode.
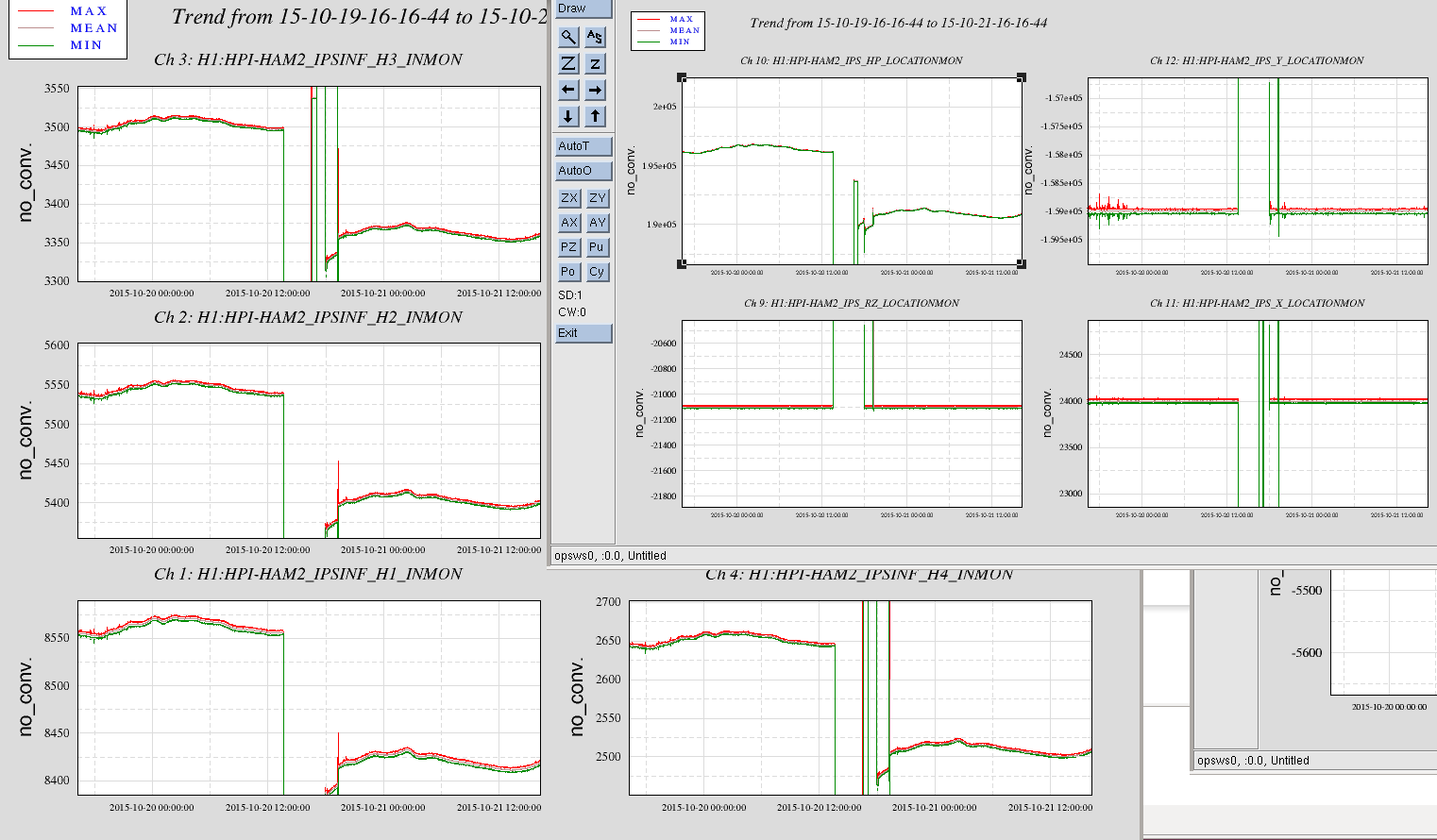
The pringle mode isolation loops of HEPI are not DC coupled, this is what Kiwamu noted in alog 22719. So despite the other cartesian positions being servo'd and back to their reference position, the pringle difference means that the local positions are not where they were before the trip. The second plot shows the four horizontal IPS positions (local) and the horizontal cartesian Location Mons. Clearly all the horizontal cartesian positions are where we tell them to go and the Pringle ends up where it does. Obviously too, the local sensors are not where they were before the trip. They all indicate about a 0.2mil (~6um) shift across the trip.
1) Kiwamu reports that the HAM2 ISI OpLev (looking at a fixed mirror on the ISI table) is only about a urad different at worst if that can be trusted.
2) It seems extreme to think that these shifts in the HEPI Actuator positions can translate ultimately to the ISI and cause shift requirements in the optics. These pringle distortions are not taken by the real support structure, the HEPI Actuator is designed to deal with that. However, the horizontal shift of the platform is experienced by the Vertical Actuators as a lateral shift of the IPS sensors wrt its flag. There will in fact also be an associated tilt with this lateral slide. These out-of-axis shifts of the sensor/flag can result in real shifts of position. The four vertical local IPS sensors all indicate around a 4um shifts.
3) So despite having restored the cartesian computations to the reference location, the actual actuators are not in their previous positions and these may lie to us at some level, some worse likely more than others, and maybe we are shifting the ISI Stage0 and ultimately the Optical Table.
Maybe this should be considered low priority but we should consider how we can close these loops so we can get repeated positions:
1) Rather than closing these loops all at once, maybe in a particular sequence to achieve a repeatable local position result
2) Maybe we actually put DC authority into the pringle modes and we'll achieve 1) without all the thinking, modeling, and teeth gnashing