gabriele.vajente@LIGO.ORG - posted 17:28, Monday 25 January 2016 (25150)
MICH output diagonalization and SRCL FF
I tried to measure the coupling of BS motion to SRCL dof, while in low noise lock. I failed, since there isn't enough actuation range on the BS to see anything good in the SRCL error signal.
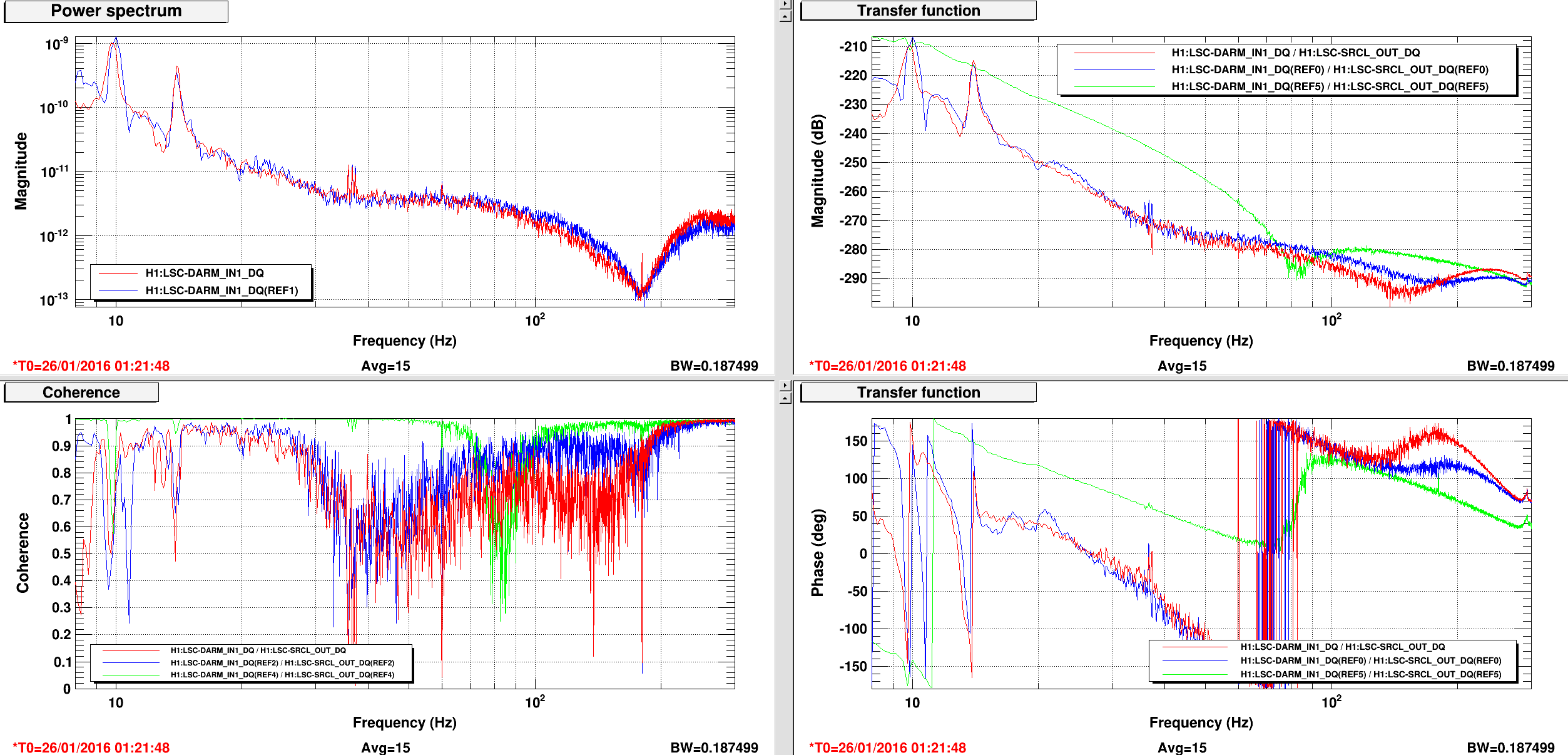
Then I measured again the SRCL feedforward, with higher resolution (0.02 Hz) and retuned it. The performance of the new FF is a bit better. In the attached plot: green is the coupling of SRCL to DARM without FF, blue is the old FF filter, red is the new FF filter.
Images attached to this report