Sheila, Den We have tuned DRMI servos to reduce the acquisition time. First of all, we noticed that MICH servo saturates the BS actuator during the flash. In order to solve this issue we have copied control filters from LLO. Attached plot shows comparison of LLO and old LHO MICH servos. Next we have changed locking threshold for SRCL and changed ramping time for PRCL and SRCL boosts. New changes are in the guardian's "NEW_DRMI_SETTINGS" state. We tested these filters (~10 times) and concluded that there is an improvement in lock acquisition time. Average DRMI wait time is 1 minute.

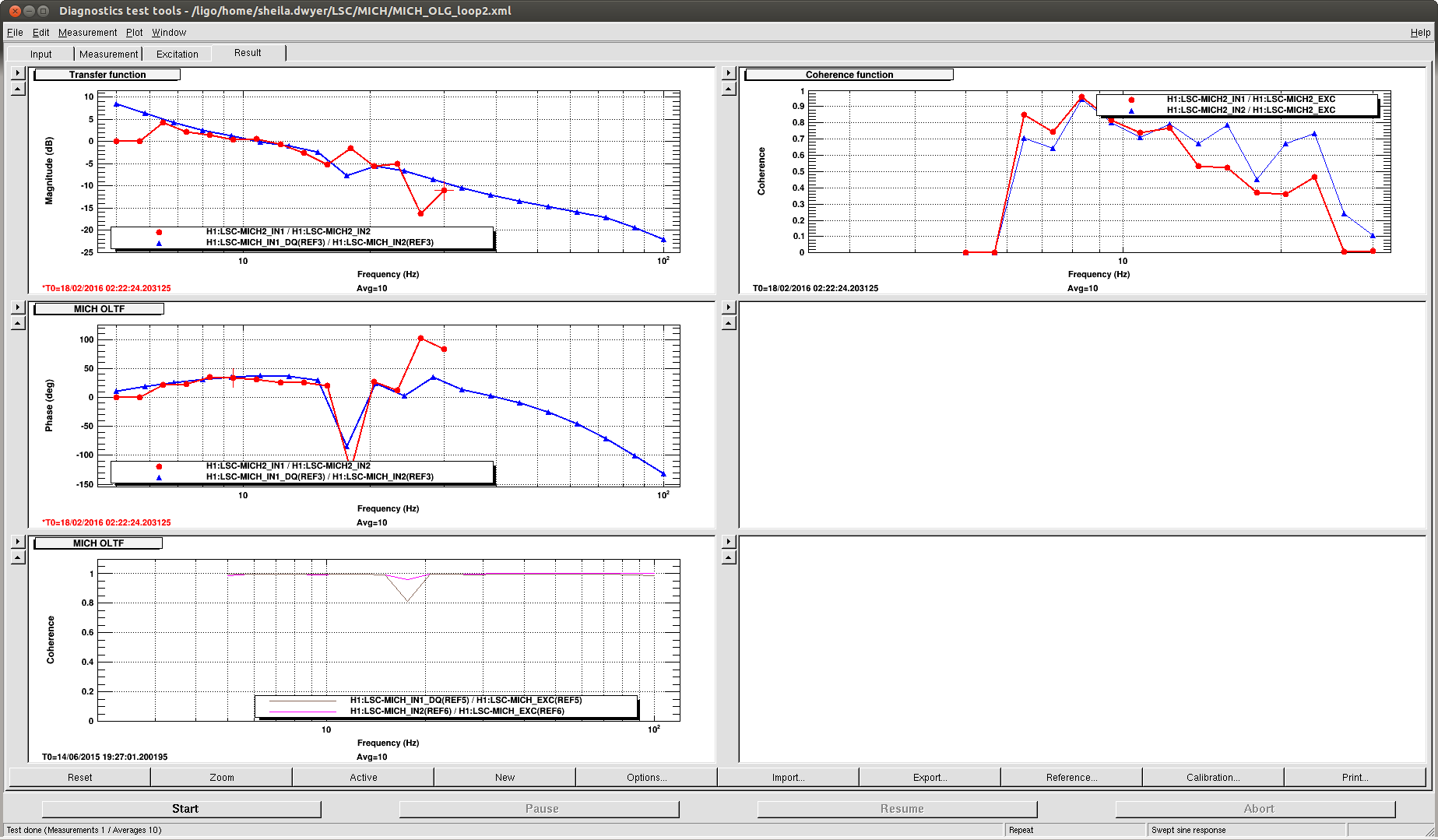
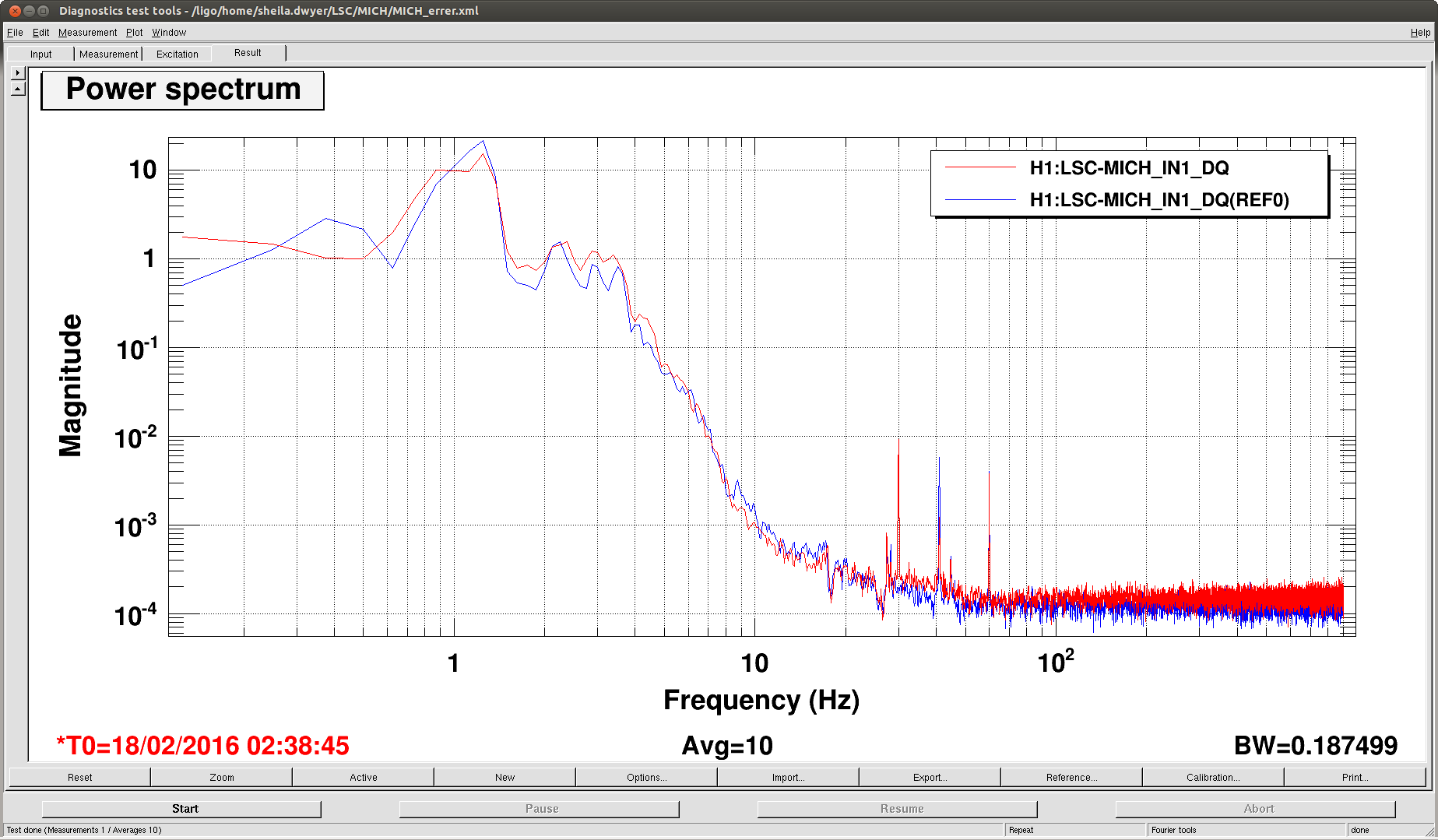
The main change to the MICH loop is that we are no longer using the invPlant filter, and are now using a simpler compensator, and that we use more aggressive low pass filtering for acquisition. Attached is a (not great) measurement of the new loop compared the the old one (in blue), and uncalibrated spectra of the error signals showing that things are fairly similar in the end.
We have now made these new settings the default guardian settings, and there are no longer two alternative DRMI paths in the guardian.
This means that our MICH loop is a little different in low noise, and that we will have to adjust our MICH FF to compensate. We have put the new compensation filter in the MICH FF bank, and den found that a gain of -15.9 gave the best subtraction at 30 Hz, and that the coherence was low. We can check with braodband excitations but have had trouble getting back to low noise since we did this.
We also made these changes to the MICH loop that is used in initial alignment to lock the dark michelson.