evan.hall@LIGO.ORG - posted 03:16, Saturday 05 March 2016 (25891)
Back to low noise
Rob, Evan
After some difficulties, we were able to get back to low noise locking.
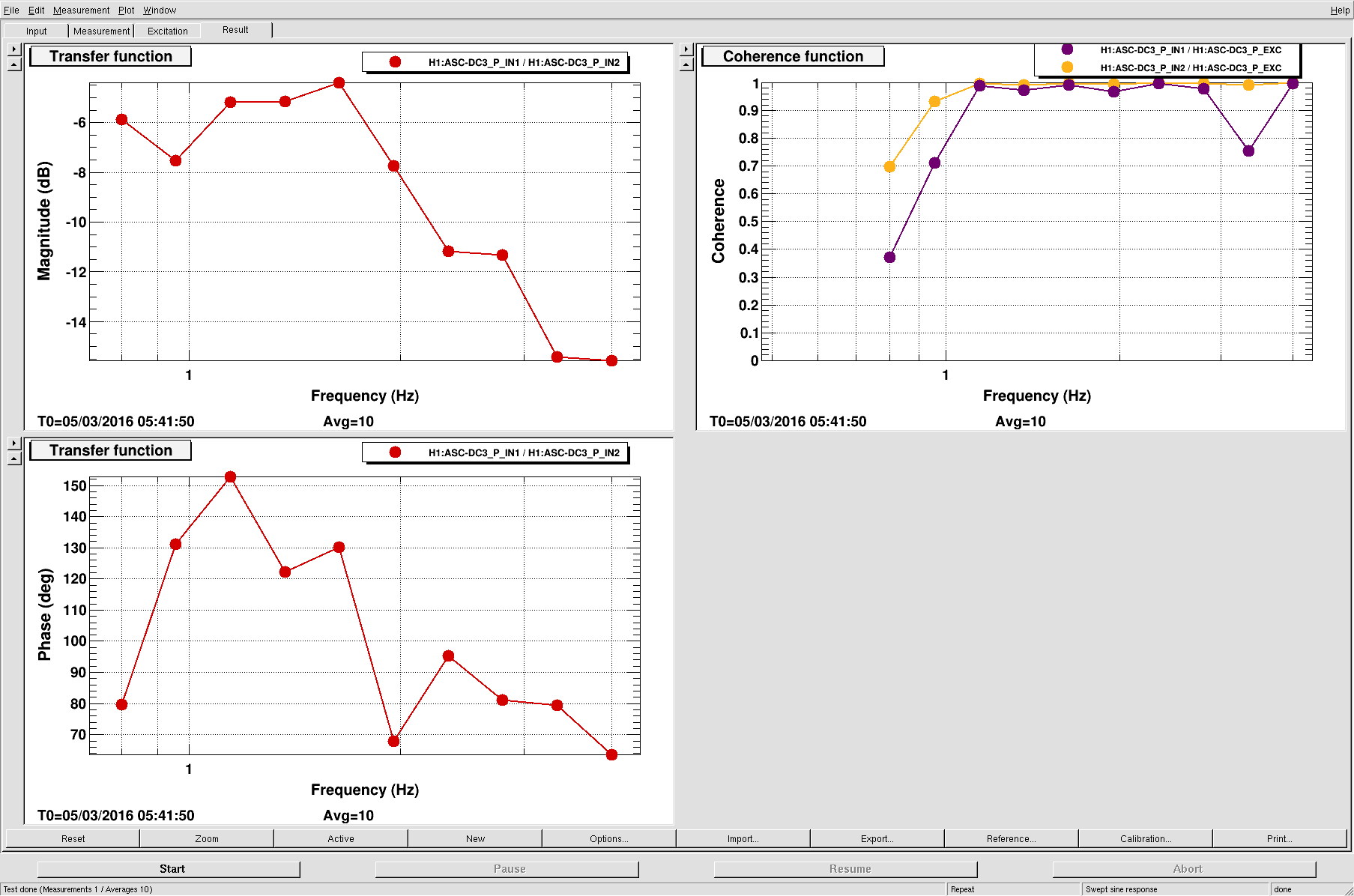
- The AS A and AS B centering loops had had their gains lowered by a factor of 3 in the input matrices. This seemed to be causing some ASC loops to go unstable in full lock. The attachment shows the OTLF of one of the pitch centering loops with this lower gain. Evidently, we have tons of phase in full lock. So we re-engaged the 20 Hz low-pass filters. Then we could engage the ASC loops as usual.
- We fixed the tidal servo (as explained elsewhere).
- We had to adjust the QPD offsets again to engage the soft loops with high recycling gain. At one point we had to move TMSY by 2 µrad in pitch in order to get ALS to lock. This required retuning the QPD offsets again. We may want to take a second look at how we choose our linear combination of TMS QPDs.
- The common soft pitch instability is again a problem when powering up. We seemed to be able to avoid this instability when engaging a 20 dB boost in this loop, and powering up in several stages. However, it's not clear that these are necessary or sufficient steps for avoiding the instability.
- The EX ISI rings up again in full lock with the 45 mHz blends.
Images attached to this report