[Stefan, Sheila, Jenne, Kiwamu, Hang]
Tonight ended up being a night of retuning the PRC2 loops, to make them sensible. Now they have UGFs around 2 Hz, rather than ~20mHz.
The thought was that perhaps this 0.4Hz oscillation that we regularly see is a result of not holding the PRC2 loops tight enough. If the PRC isn't following the motion of the SOFT loops (which move when we power up due to radiation pressure), then we're getting a modulation in the amount of power coupled in to the arms from the PRC. This power modulation makes the SOFT oscillation even worse. If we force the PRC to follow the arm pointing, then we won't have this power modulation, so we will hopefully only have to deal with "regular" angular instabilities.
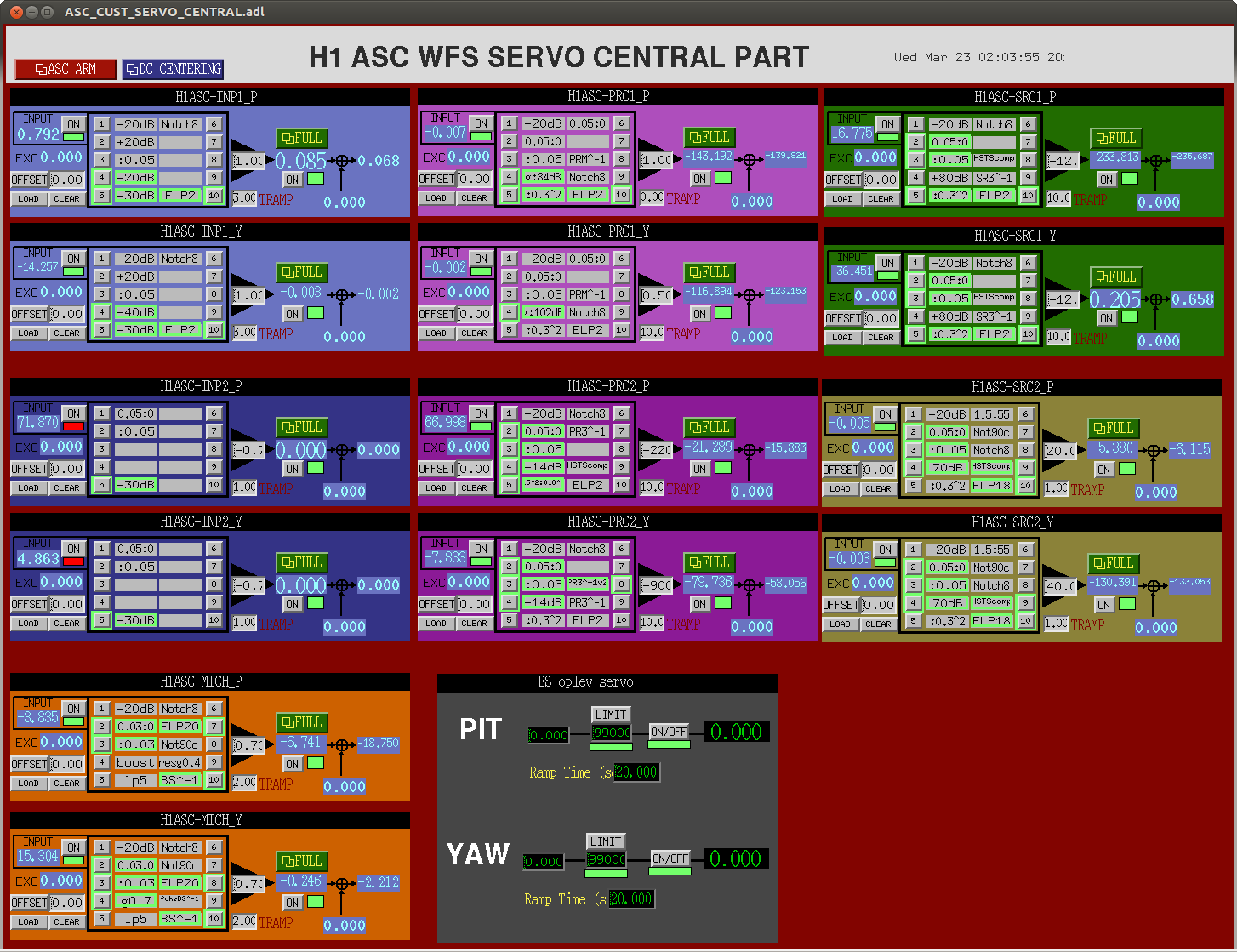
In the end, we tuned the shape of the PRC2 pitch and yaw loops while sitting at ASC_PART3 by compensating the PR3 suspension resonances. This made the loops beautifully stable, so we cranked up the gain. For the PRC2_Pit loop, we use the new shape (although low gain) for DRMI_ASC. For the PRC2_Yaw loop, we use the old loop shape and gain during DRMI_ASC, and then use the new loop shape for the main ENGAGE_ASC steps. Recall that all DRMI ASC loops except for MICH are turned off after offloading the alignments, and are left off for the carm offset reduction sequence. Also, during DRMI_ASC, the PRC2 loops actuate on PR2, while they actuate on PR3 in the final state, so it's not quite as weird as it sounds to be using different shapes at different states.
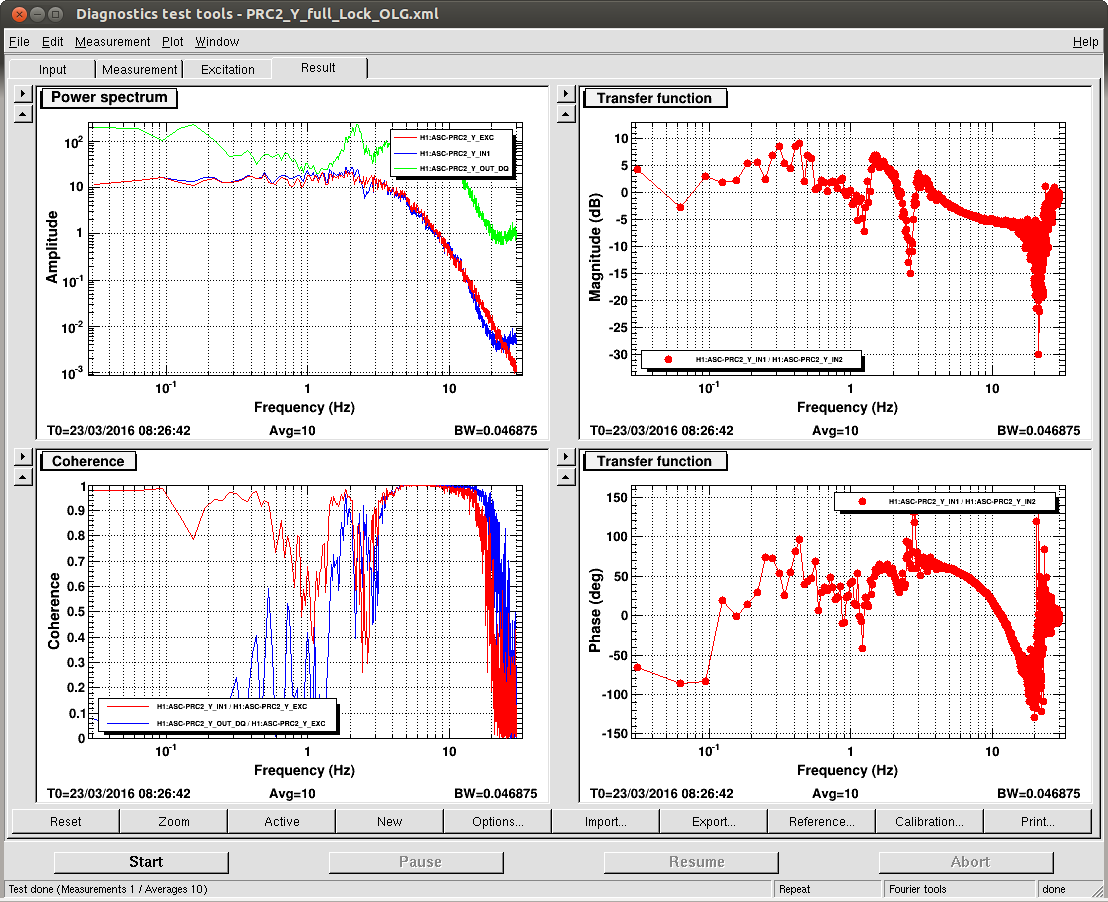
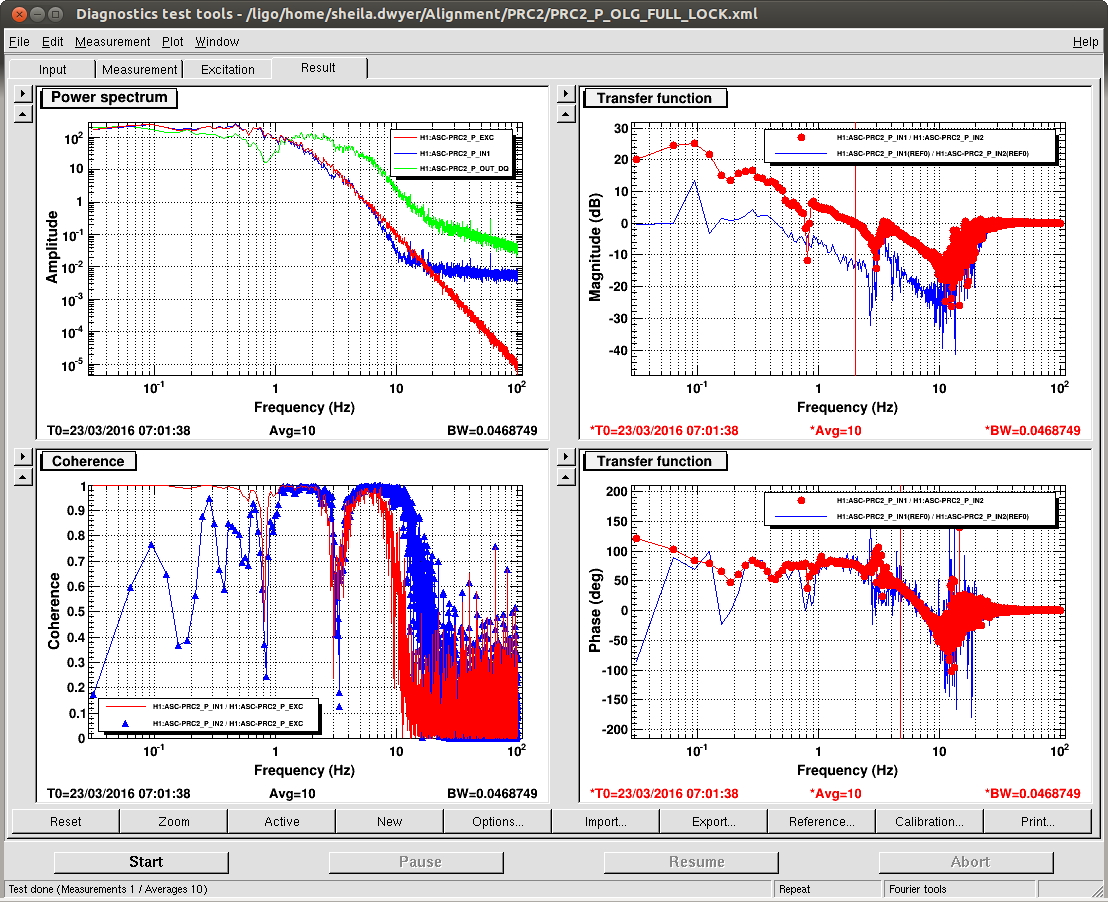
See the attached PRC2 open loop measurements for the OLG after our retuning and gain increases. All of these sequences have been added to the guardian.
Now however, when we try to go from 12W to 15W, we see an oscillation in PRC1 Yaw. We should probably retune the PRC1 loops, including actuating on the lower mass in addition to the top mass of the PRM (right now we only push on the top mass). We leave this for another day.
ASC plan for tomorrow: Run Hang's A2L script, and find SOFT offsets that put us at our actuation nodes. Hopefully this will reduce the angular effects of increasing the power, and help us get back to 20W.
* Alog title courtesy Stefan
Other things tonight:
1) I added filters with a gain of -1 to the roll mode damping for ETMY and ITMY, so that the gains for all of the loops will be positive from now on. This is in the guardian and should make things easier for people who need to damp roll by hand when it is rung up badly. I will work on doing this for bounce as well but that is not finished.
2) We had 2 locklosses in DRMI on pop tonight, looking at them I saw that we were switching the coil drivers while the DRMI sensors were still ramping. I added a timer to make sure they don't switch until the ramp is over now.
Jenne and stefan also made some bug fixes for the code that switches off the soft loops when their outputs are too large.
It seems like the problem we have now is really the PRC1 Y loop going unstable, which is not too suprising since this is cross coupled with the PRC2 loop which we changed last night.
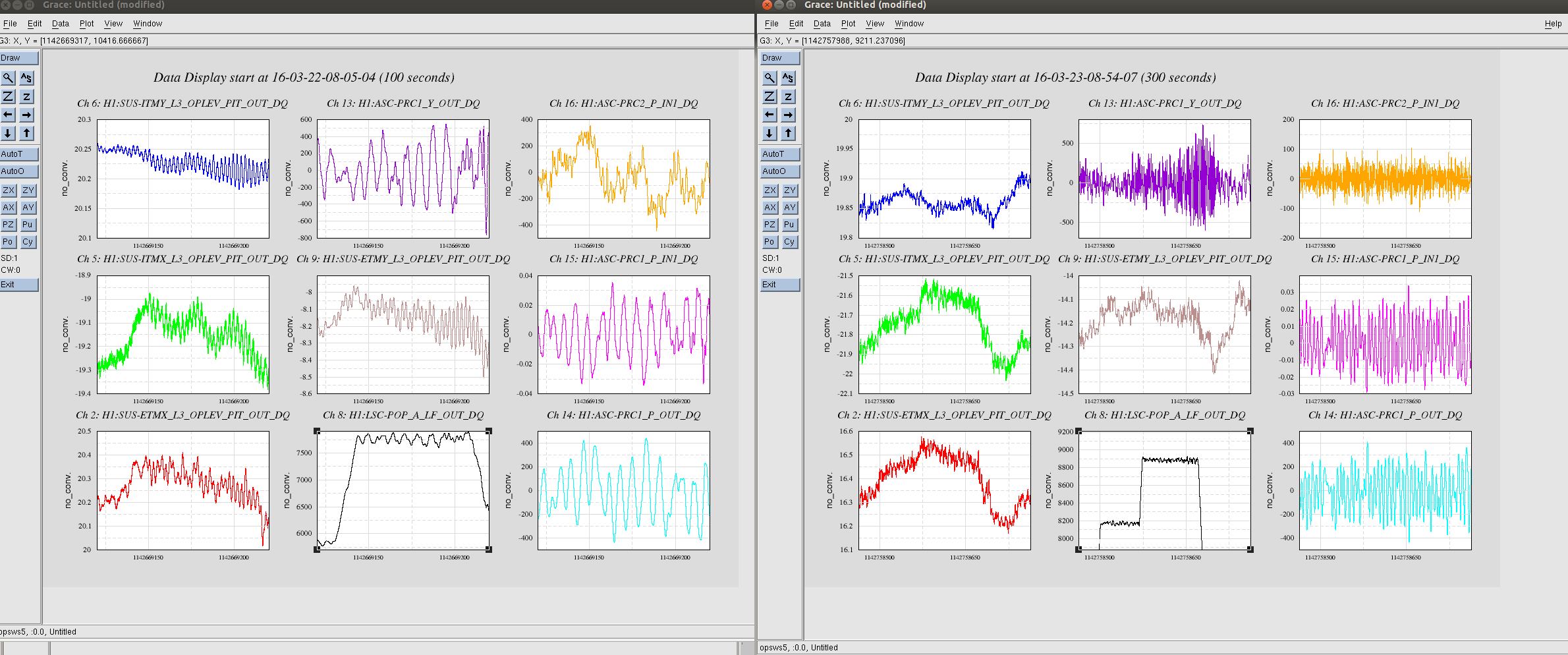
The attached screenshot shows on the left the optical levers, POP build up and PRC control and error signals. The left panel is for a time when we rang up the half Hz CSOFT instability which is visible in the optical levers, and the pop build up somewhat. The second panel shows what happened after we increased the gain in the PRC2 lops, we see nothing in the optical levers but the PRC1 Y loop is unstable. This is the same problem kiwamu had later in the night.
As Jenne said it should be relatively easy to fix the PRC1Y instability.