F. Clara, N. Kijbunchoo, R. McCarthy, V. Sandberg, P. Thomas
As per Work Permit #5809, we performed maintenance inspection and repairs as necessary on the EtherCAT DC Motor Controllers and Rotation Stages located on the PSL and the TCS X and Y arms. The EtherCAT chassis "X1-PSL-C1" described in D1101114 and located in the LVEA CER was removed to the Electronics Lab. There the chassis was inspected, the wiring was verified, and all connections were re-dressed and re-seated in their Beckhoff or spring-key connector blocks. A number of build quality issues were found (e.g., too short a stripped wire, wires not properly seated, and ground screws not tight enough) and corrected. The chassis was reinstalled and powered up. The PSL rotation stage was checked by hand entry of commanded angles and found to operate satisfactory. We left it at the minimal power angle, ~ -24 deg. The TSC rotation stages were tested with a script that generated 100 random angles to be requested and recorded the final angle position. Results are shown in the attached plots. In all cases the measured angle was within 0.1 deg of the requested angle. The angles spanned the range of -90 deg to +90 deg. There was no observed problem dealing with angles in the neighborhood of zero degrees.
Excellent!
F. Clara, N. Kijbunchoo, and V. Sandberg
We measured the DC resistance of the cable plus motor coil at the input connector to the EtherCAT chassis for each of the rotation stages. These were then loaded into the corresponding TwinCAT CoE parameters with the values shown below.
Measured cable + motor coil resistance:
Subsystem Measured Resistance [ohms] DC Motor, CoE Index, & Value (old value)
========= ========================== =======================================
PSL 57.6 L1_2 Ch.1 8020:04 5760 (6350)
spare --- L1_2 Ch. 2 8030:04 set default to 5900
TCS X 56.9 L3_4 Ch. 1 8020:04 5690 (6350)
TCS Y 59.0 L3_4 Ch. 2 8030:04 5900 (6350)
These are stored in the Beckhoff CoE table under, e.g., 8020:04 in units of 0.01 ohm.
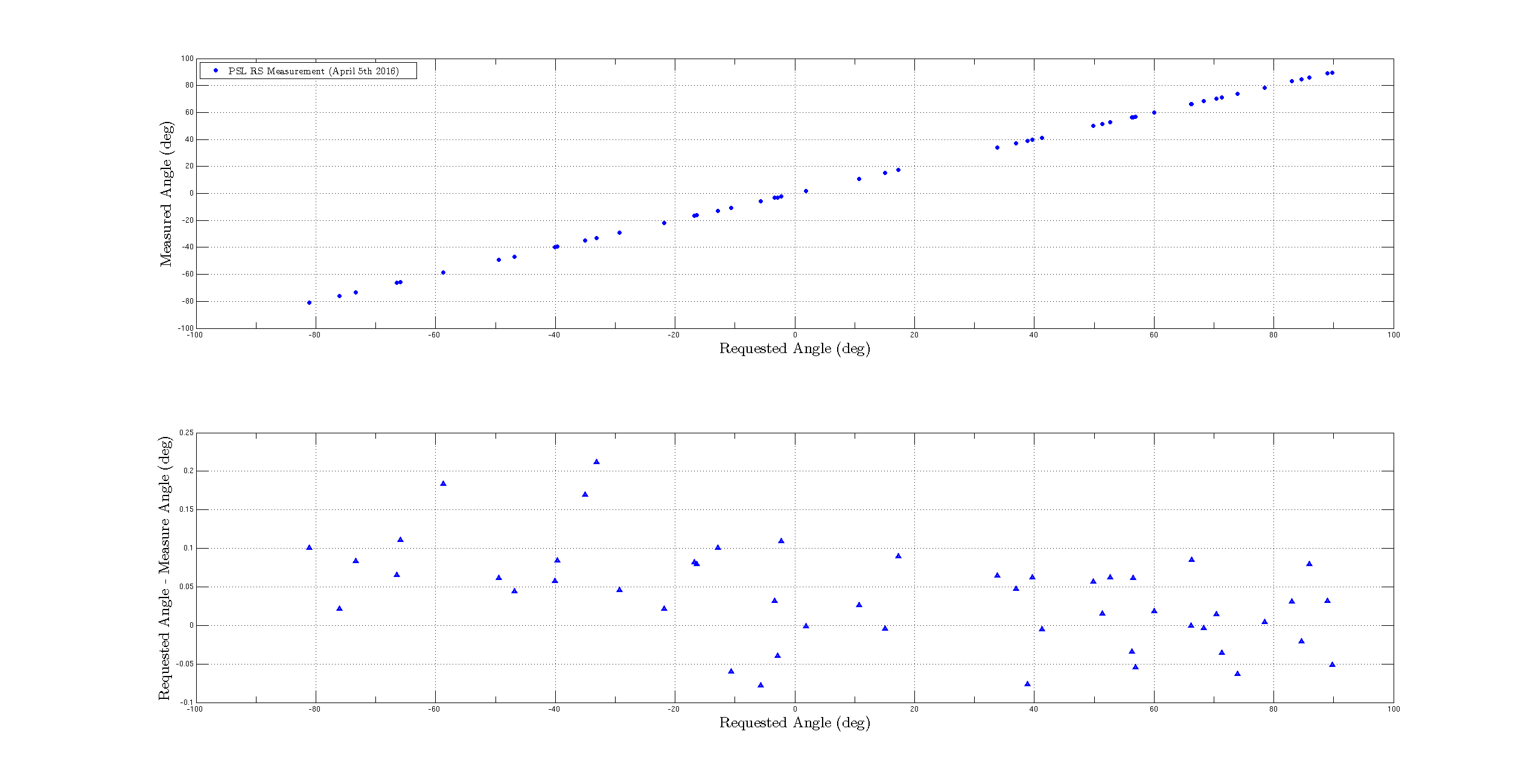
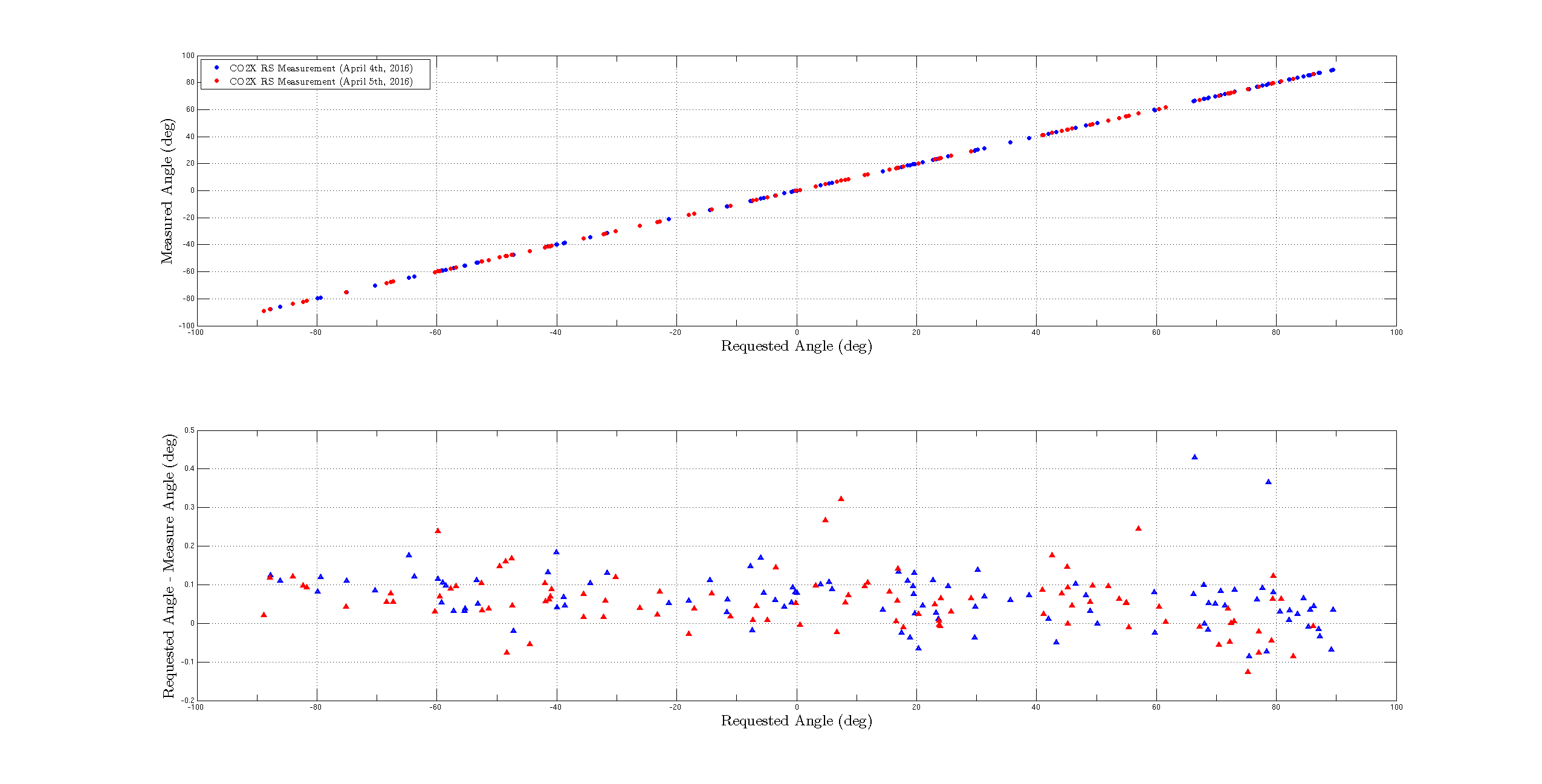
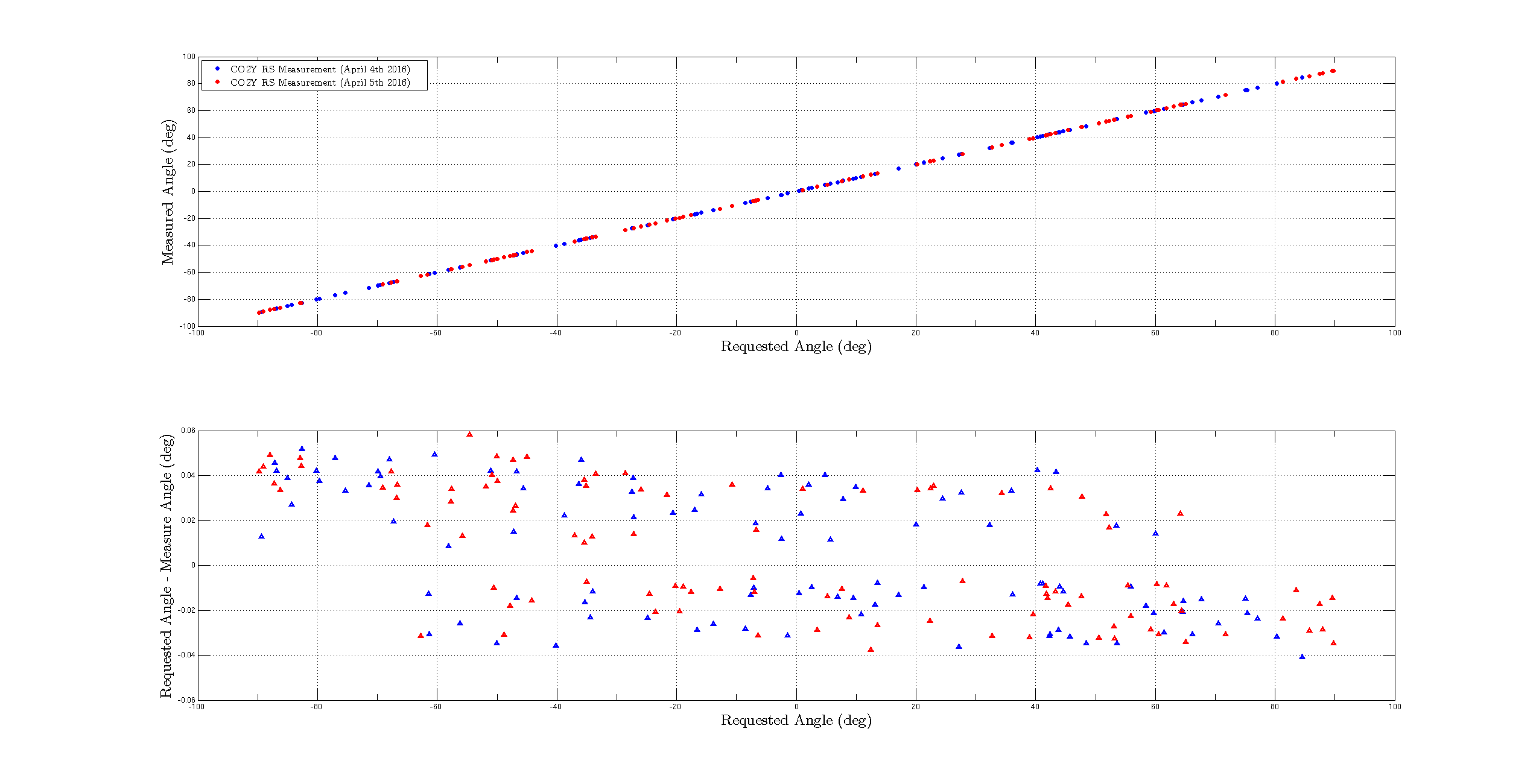
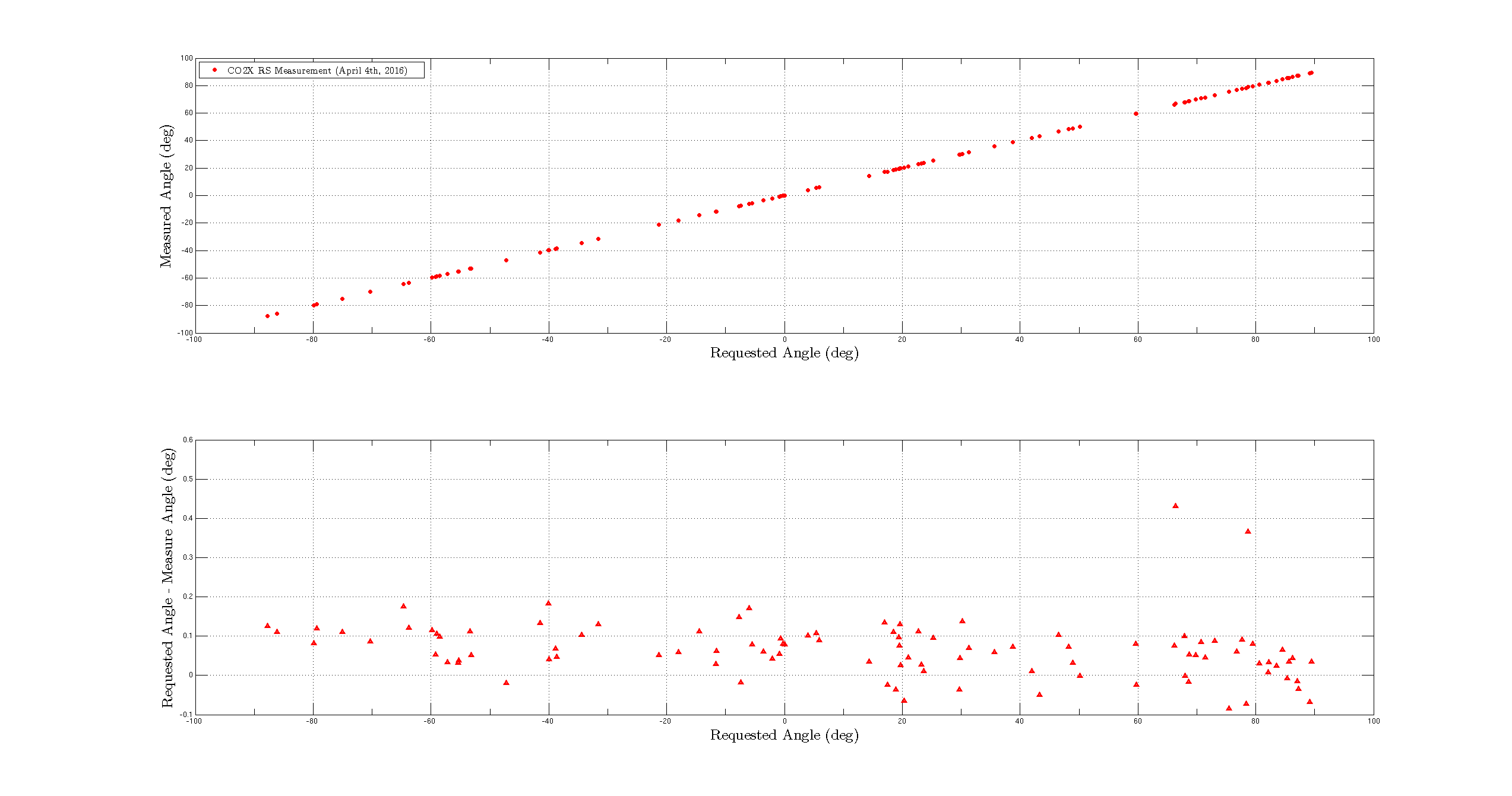
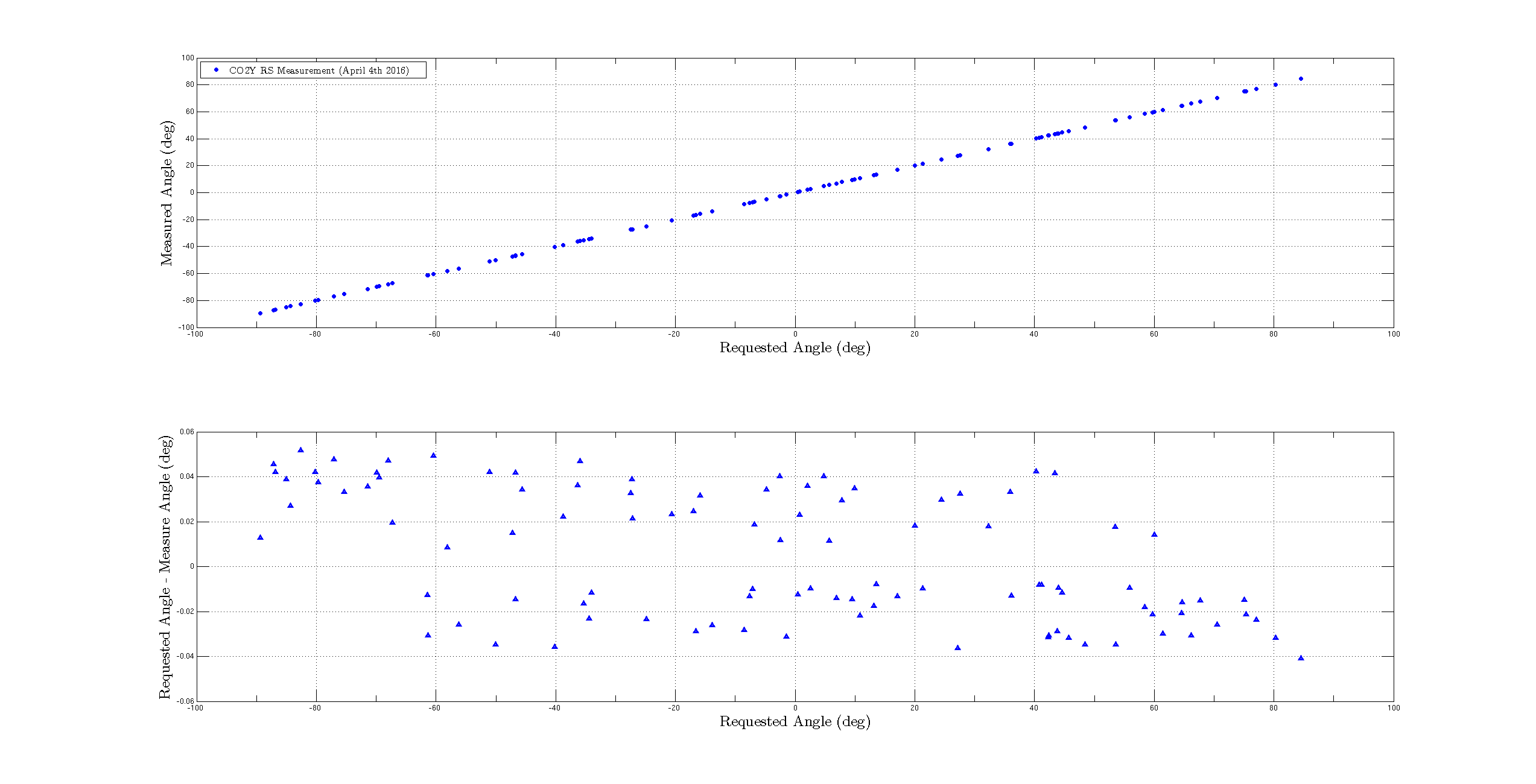
A sampling of 50 random angles were then sent to each of the rotation stages. Plots of the requested angle vs the actual angle and the residuals are shown in the attached figures for the PSL, TCS-X, and TCS-Y rotation stages.
The Beckhoff EtherCAT + TwinCAT software + interface electronics (cable drivers) + Newport Rotation Stage appears to work under conditions of normal CDS network activity.