Michael, Krishna
Winds are very low today which has given us an off-day to look at boring stuff like instrument noise and other techinical details. We also got a loud and interesting earthquake which Michael will post about later.
Quiet period data
The attached pdf shows an ASD of 5K seconds of data during quiet conditions last night with wind-speeds between 0-5 mph. The blue and green show the BRS_in (raw) and BRS_OUT signals. The seismometer Y signal (converted to angle units) is shown in red. There is very little coherence between the two sensors. BRS-2's signal level is improved over that shown in 26387, but is still seeing some excess noise/signal compared to the STS.
The BRS ref signal is the angle of a stationary reference mirror in vacuum and is representative of the autocollimator noise. However, unlike BRS-1, here the calculation of this angle is done at a slower rate than the main mirror angle, hence it's white noise floor is higher. It is still useful as a measure of the noise at lower frequencies (below ~ 0.1 Hz). In this case, it looks like the BRS_OUT may be partially limited by the autocollimator noise near 10-30 mHz.
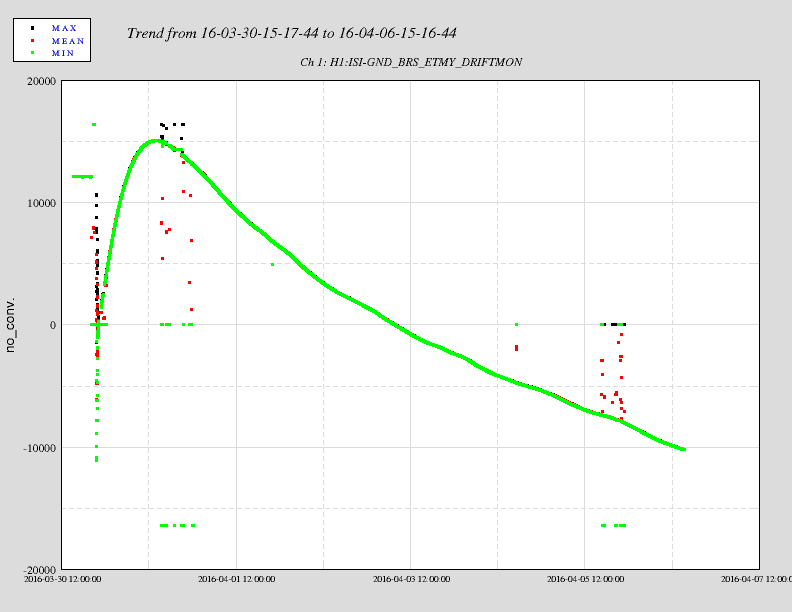
BRS_DRIFTMON
The image file attached (BRS_DRIFTMON.png) shows the DC position of the beam-balance over the last 7 days. The inital rise corresponds to when we first closed the foam-box, which lead to a 2 deg C increase in the temperature inside the box. The beam-balance appears to still be equilibrating slowly. The range of the autocollimator is +/- 16K counts as shown on the Y-axis (~ 2 mrad range). Going by the trend, it may get too close to the edge of the range and we will likely try to position it a bit more to the center. Once it does settle, the DC position does remain fairly constant, unless there are big changes in VEA temperature.
BRS2 Damping issues
The initial scheme for BRS-2 capacitive damping was that it would turn ON when driven above a HIGH threshold, would damp with a Q of ~5 below a LOW threshold and then is turned OFF. Brian L. had suggested considering leaving it on with a Q of ~50 all the time. We tried this for some time and found it doesn't work currently. There are at least two reasons - 1) There exists a potential difference between the grounded beam-balance and the capacitior plates even when they are grounded, (Contact Potential Difference). This is on the order of ~0.1 to 0.2 V and appears to vary very slowly with time (may get smaller). This creates issues when we are trying to damp very small amplitudes as the sign of the actuation force changes near this potential 2) The capacitor plates on the left and right side are not matched well and we do not account for the actuator gain mismatch when we apply damping creating uneven actuation. This could be fixed with careful testing in the future.
So, as things stand, just enabling Q=50 damping all the time doesn't work and adds more noise than expected. Careful analysis of the actuation may enable this in the future.