Kiwamu, Sheila, Hoacun, Evan
We've worked on all four hard loops today.
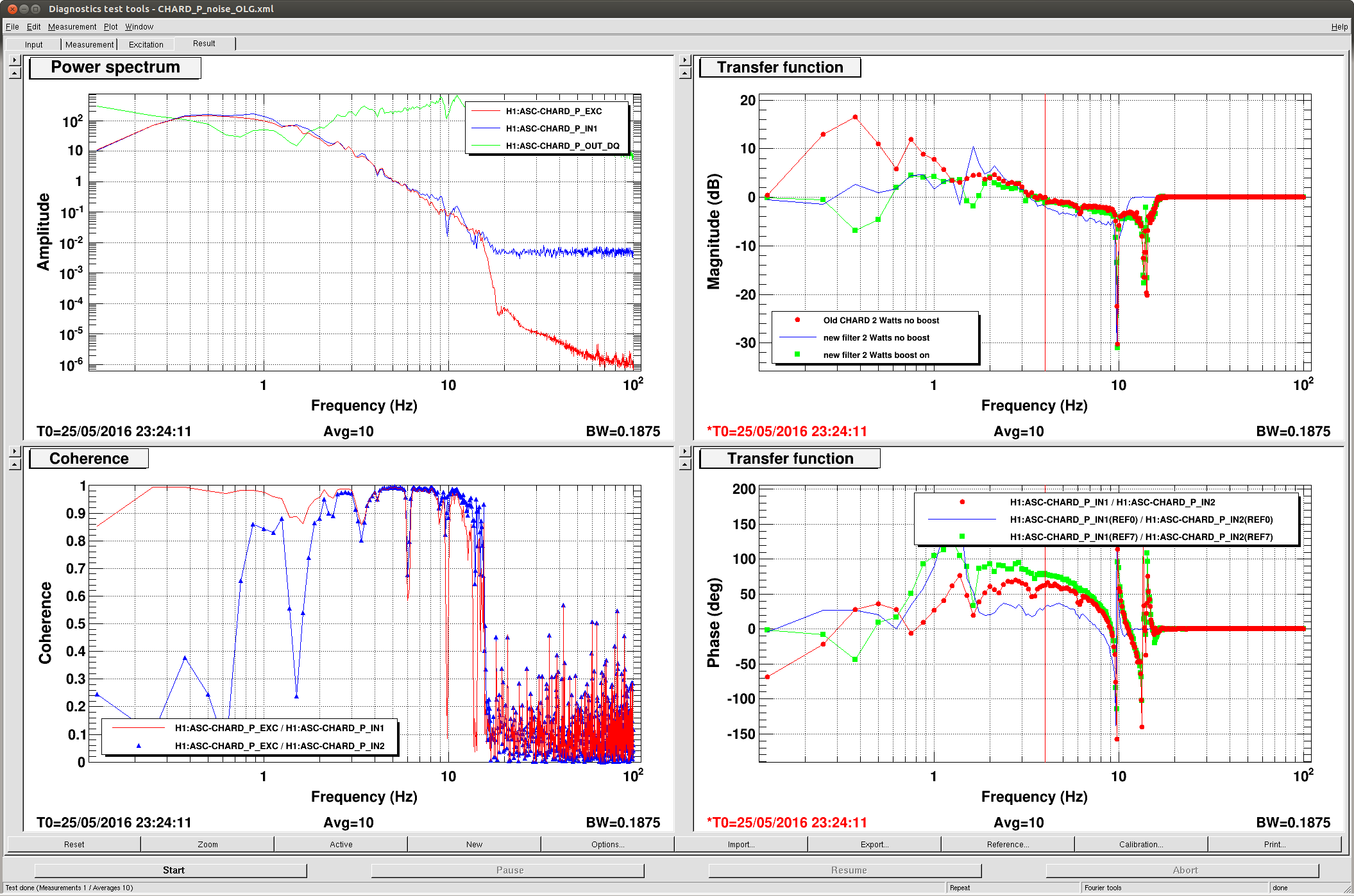
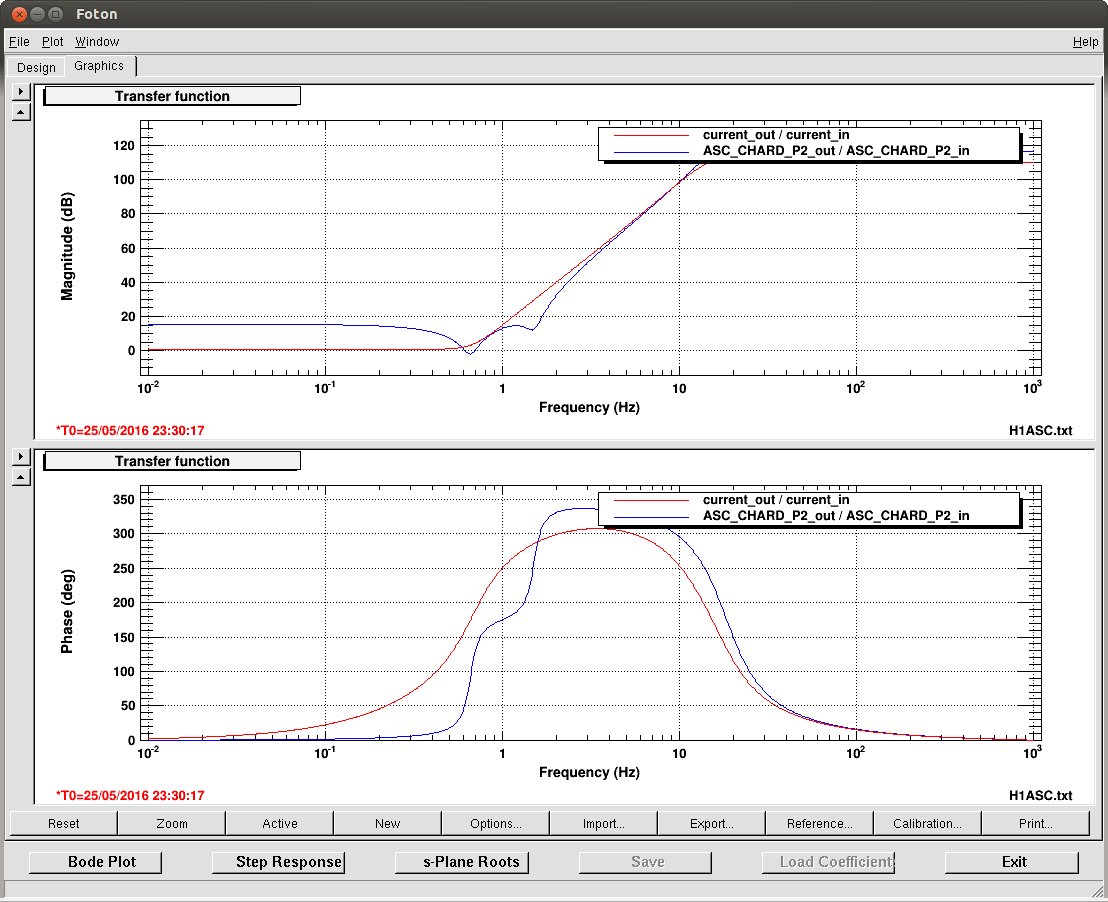
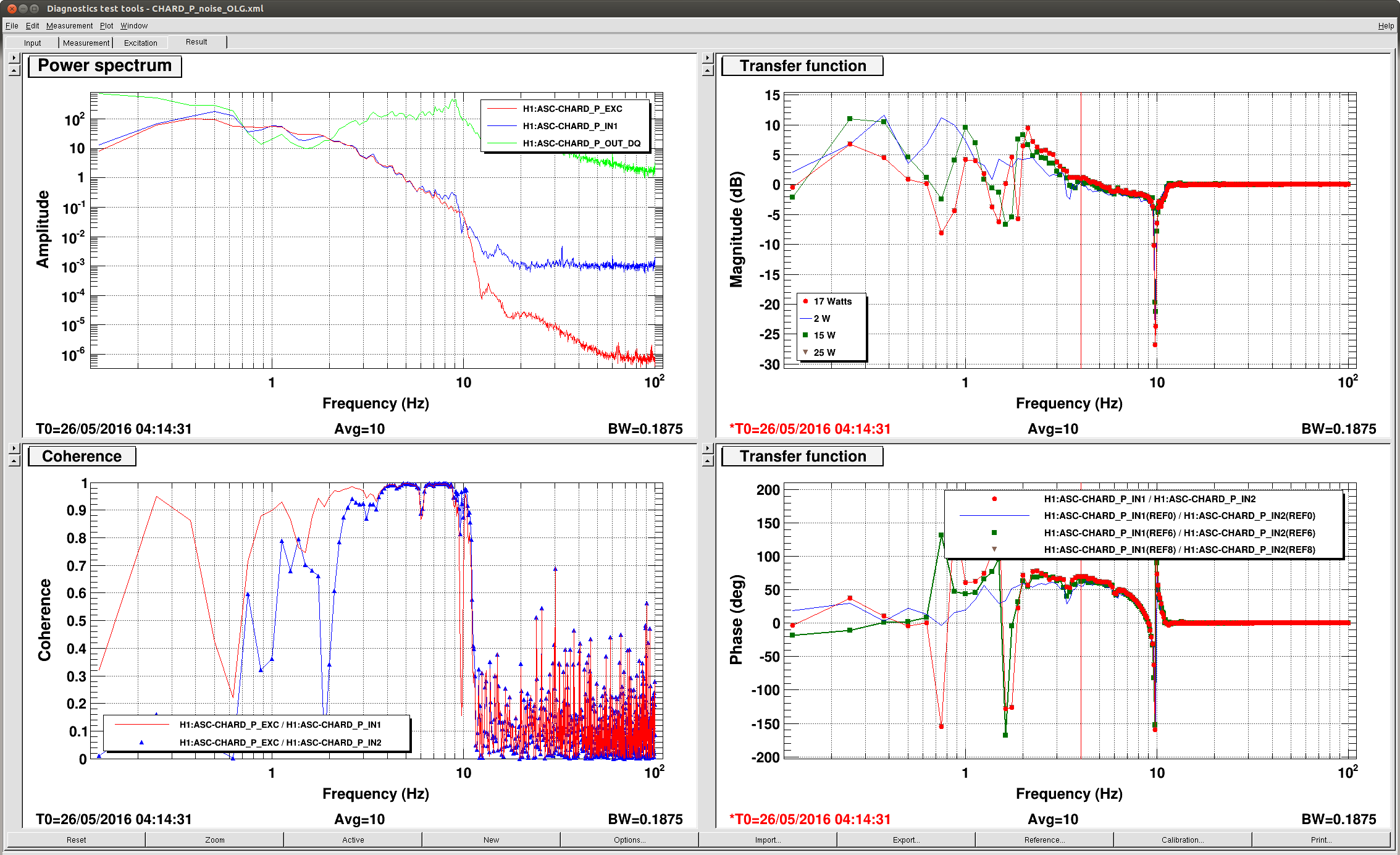
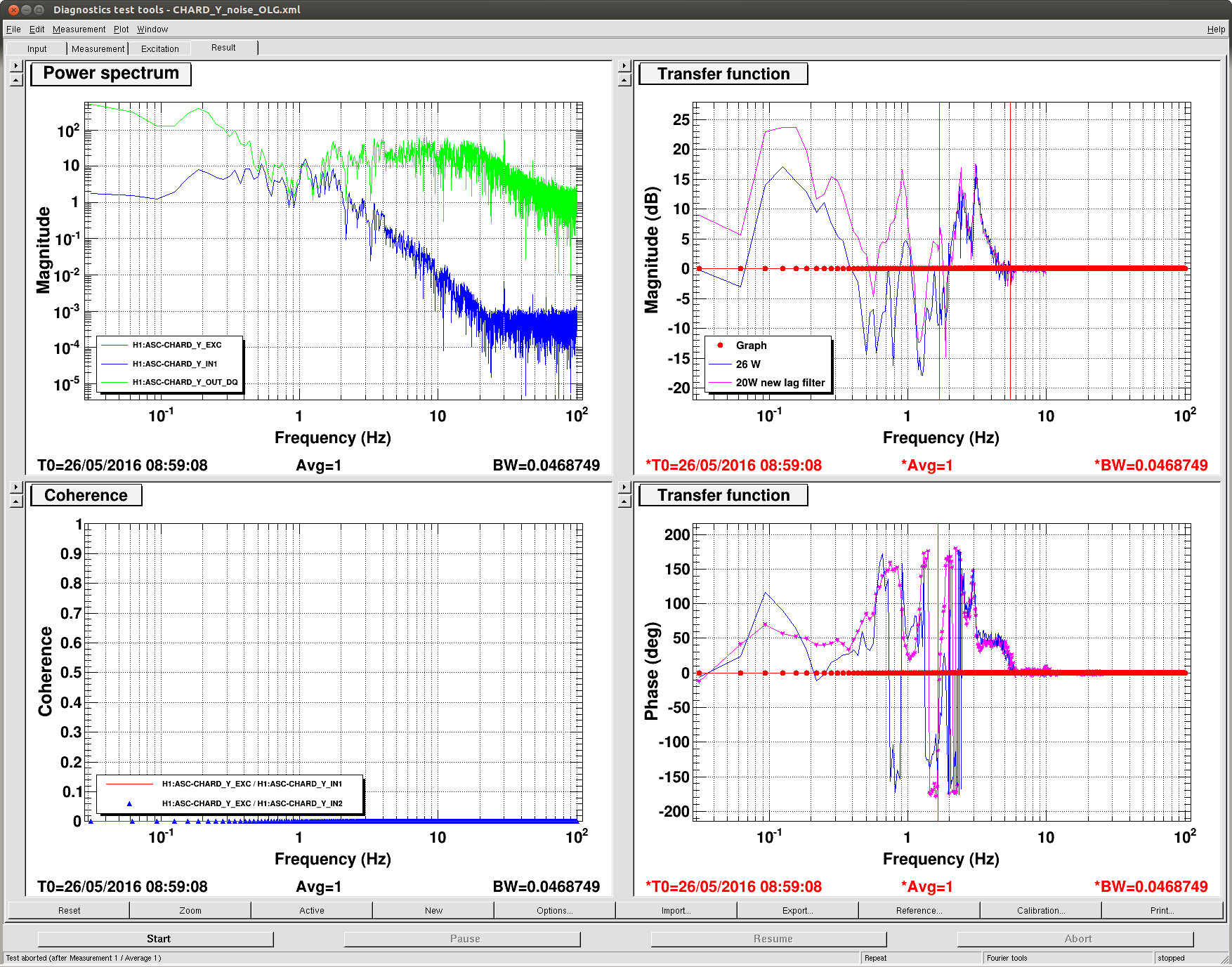
First we designed a new compensator for CHARD P, which roughly inverts the plant at 2W and should be stable all the way to 50 Watts according to the model. (Screenshots of filter change and before and after OLG measurements attached.)
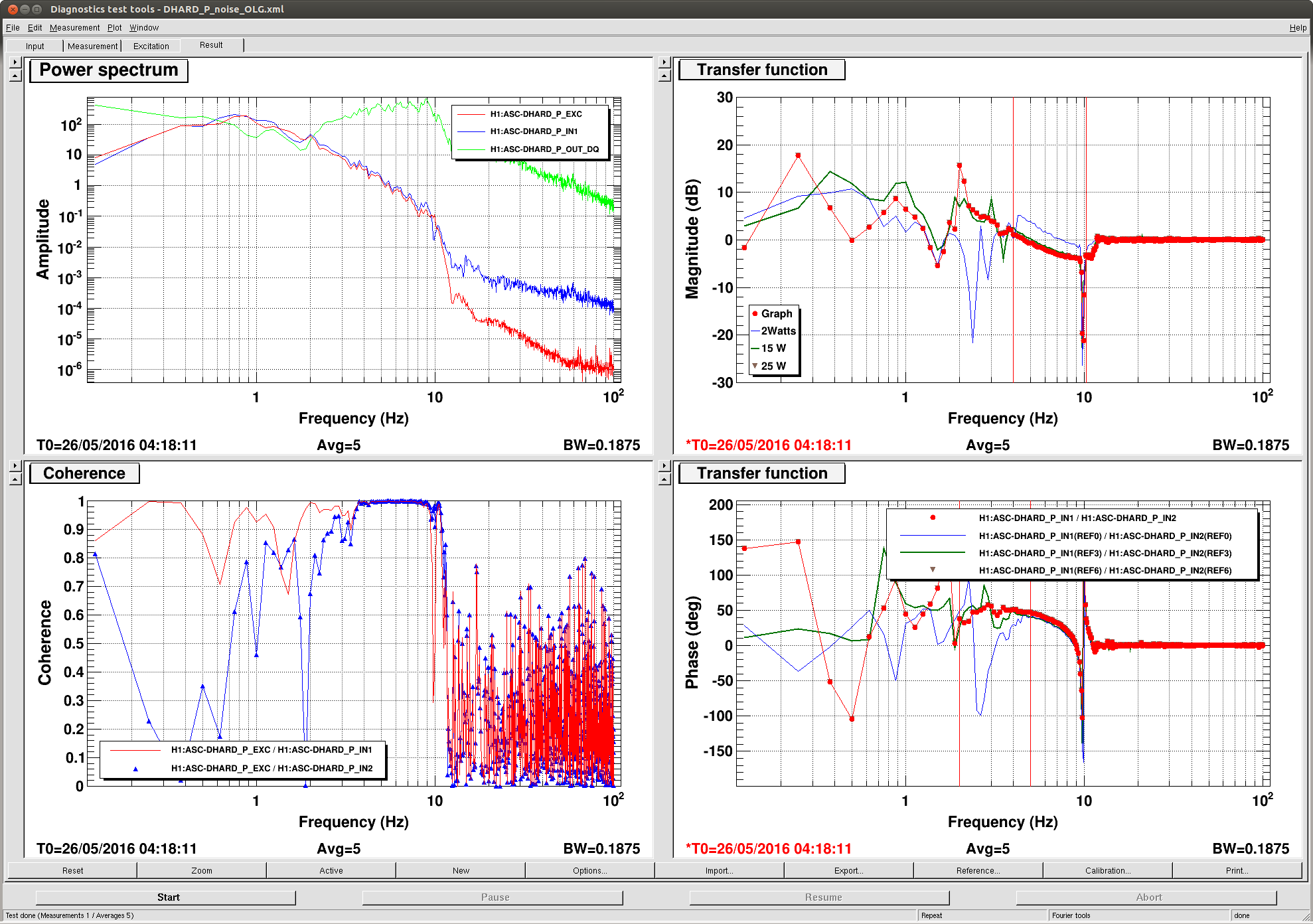
We tried this for DHARD, but it was not stable durring the CARM offset reduction. Instead we made a filter that is the ratio of the new compensator to the old, which is engaged on resonance.
Then we had a look at the hard yaw loops, and adjusted the boosts in both loops to move the zeros to higher frequencies.
This is all in the guardian.
Things not in the guardian:
We have seen several times that engaging the ISS 3rd loop supresses the CSOFT P instability (engage second loop output, set 3rd loop gain to 0.04). I tried once to engage it at 20 Watts, and it broke the lock.
When we approach 40 Watts, there is an instability at nearly 2 Hz in yaw that breaks the lock. It is clear from the transfer function of both CHARD and DHARD yaw that there is a problem here. I tried a lag filter (FM4 in both DHARD and CHARD Y) to avoid the instabilites. These can come on by hand at 20 Watts, and do avoid the instability but just shift the problem to little bit of a lower frequency where we have a little gain.
After adding these filters I became unable to get test points using DTT (the test points were all full for ASC, so I cleared them, but I still couldn't get anything from dtt. I tried closing my dtt session and starting over, but that didn't work either).
I tried powering up one last time, it looked like an instability in DHARD P was the problem this time.
I turned off the XARM ring heaters to prepare for a PI test tomorow.