patrick.thomas@LIGO.ORG - posted 14:06, Tuesday 21 June 2016 (27886)
end Y Beckhoff vacuum controls code updated
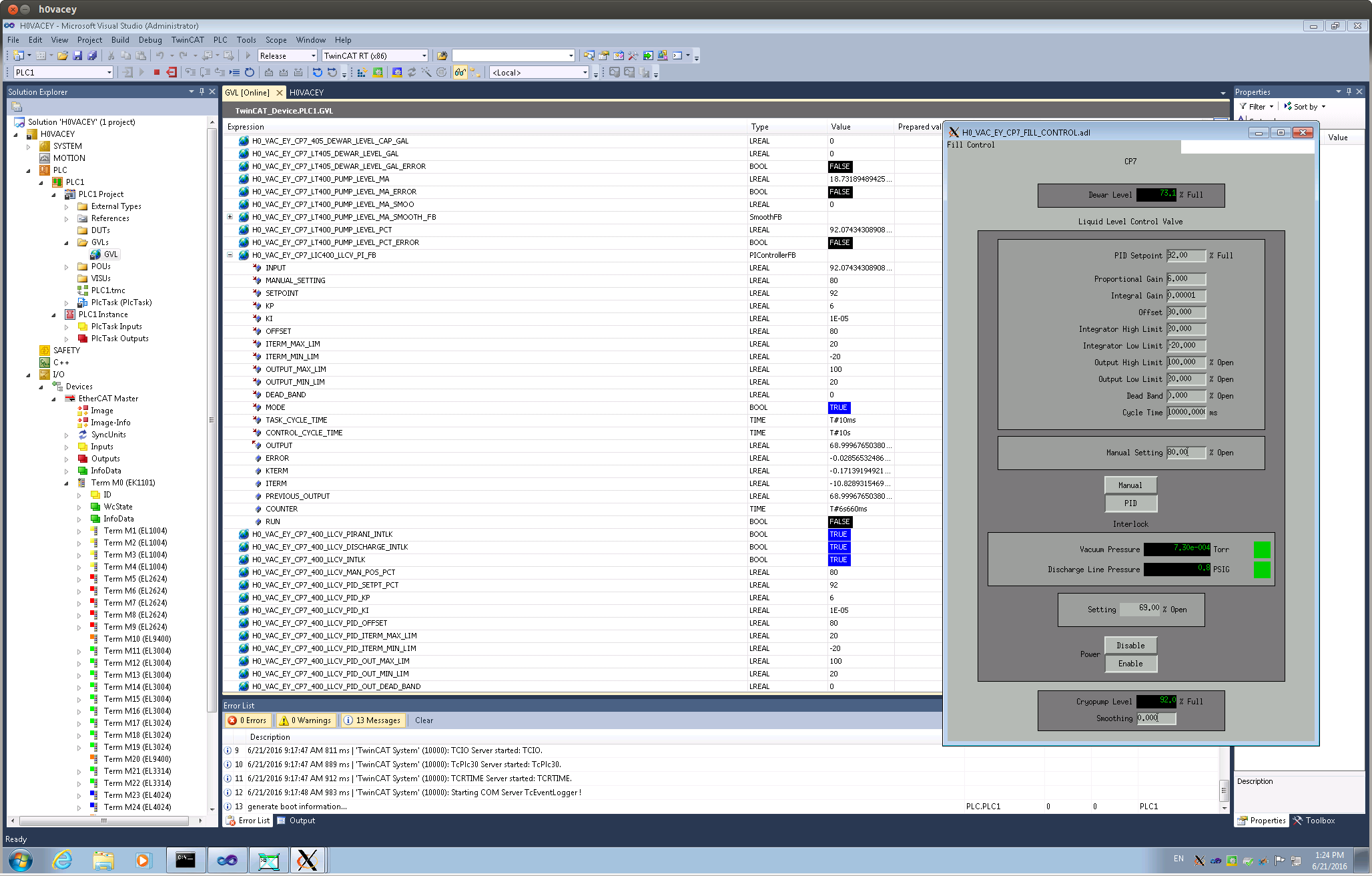
WP 5948 The code for the Beckhoff vacuum controls at end Y has been updated and restarted. This changes the PID controller for the CP LLCV from the FB_BasicPID supplied with the Tc2_Utilities library to a PI controller that I wrote (PIContollerFB in the Vacuum library). The changes include: - There is a manual control mode. Switching to manual control stops and resets the PI controller. - Changing the PI gains does not reset the controller. - The controller can be set to run at a slower rate than the PLC task (not in effect in manual mode). This is the cycle time on the medm screen. - There are user settable limits on the size of the integral term (anti-windup). These are the integrator high and low limits on the medm screen. - There are user settable limits on the output (not in effect in manual mode). These are the output high and low limits on the medm screen. - There is a user settable dead-band. The controller output does not change unless the absolute value of the difference from the last controller output is greater than the dead-band (not in effect in manual mode). - It has a user settable offset term in addition to the proportional and integral gains. This is essentially a constant offload of the integral term. The form of the controller is basically: Output = KP * Error + sum( KI * Error * (cycle time in milliseconds)) + Offset where KP is the proportional gain and KI is the integral gain I have updated the medm screen for CP7. I have also updated the overview medm screen to add links to the fill control screens next to each CP. One issue is that the displayed precision for the integral gain is too small. I will fix this at the next opportunity to restart the code. In the mean time it can be temporarily changed by right clicking on the medm screen, selecting PV Limits, clicking on the input field of the integral gain, changing the precision source to user specified, and changing the precision value to 6. This change will be lost when the medm screen closes. The code is currently controlling CP7 in PID mode, which also happened to get a LN2 delivery around the same time as the code change. The current settings are shown in the attached screenshot. The PID setpoint and offset may be hard to read, they are 92 and 80 respectively. The following channels were removed from the DAQ: H0:VAC-EY_CP7_400_LLCV_PID_ERR_CODE H0:VAC-EY_CP7_400_LLCV_PID_ERR_FLAG H0:VAC-EY_CP7_400_LLCV_PID_OUT_PCT H0:VAC-EY_CP7_400_LLCV_PID_TD H0:VAC-EY_CP7_400_LLCV_PID_TN H0:VAC-EY_CP7_400_LLCV_PID_TV H0:VAC-EY_CP7_LIC400_LLCV_POS_CTRL_PCT_DEAD_BAND The following channels were added to the DAQ: H0:VAC-EY_CP7_400_LLCV_PID_KI H0:VAC-EY_CP7_400_LLCV_PID_OFFSET H0:VAC-EY_CP7_400_LLCV_PID_ITERM_MAX_LIM H0:VAC-EY_CP7_400_LLCV_PID_ITERM_MIN_LIM H0:VAC-EY_CP7_400_LLCV_PID_OUT_MAX_LIM H0:VAC-EY_CP7_400_LLCV_PID_OUT_MIN_LIM H0:VAC-EY_CP7_400_LLCV_PID_OUT_DEAD_BAND
Images attached to this report