Corey, Nergis, Stefan, Sheila, Terra
We were locked above 50 Watts for ~10 minutes. Our high bandwidth HARD loops along and the ISS 3rd loop are keeping us stable enough to power up, but we still have some things to work out.
-
Corey found that we were saturating a few diodes above 40 Watts.
- We lowered the whitning gain for all the AS36 WFS by 6dB, (and doubled the gain in the filter modules to compensate), and redid the dark offsets.
- We also lowered the whitening gain for LSC-POP_A I and Q, by 6dB, and redid the dark offsets.
- For POPX, we turned off one stage of whitneing filters, and reduce the whitening gain by 9 dB, but didn't do dark offsets as this was done in lock. (We need to check these dark offsets in the morning).
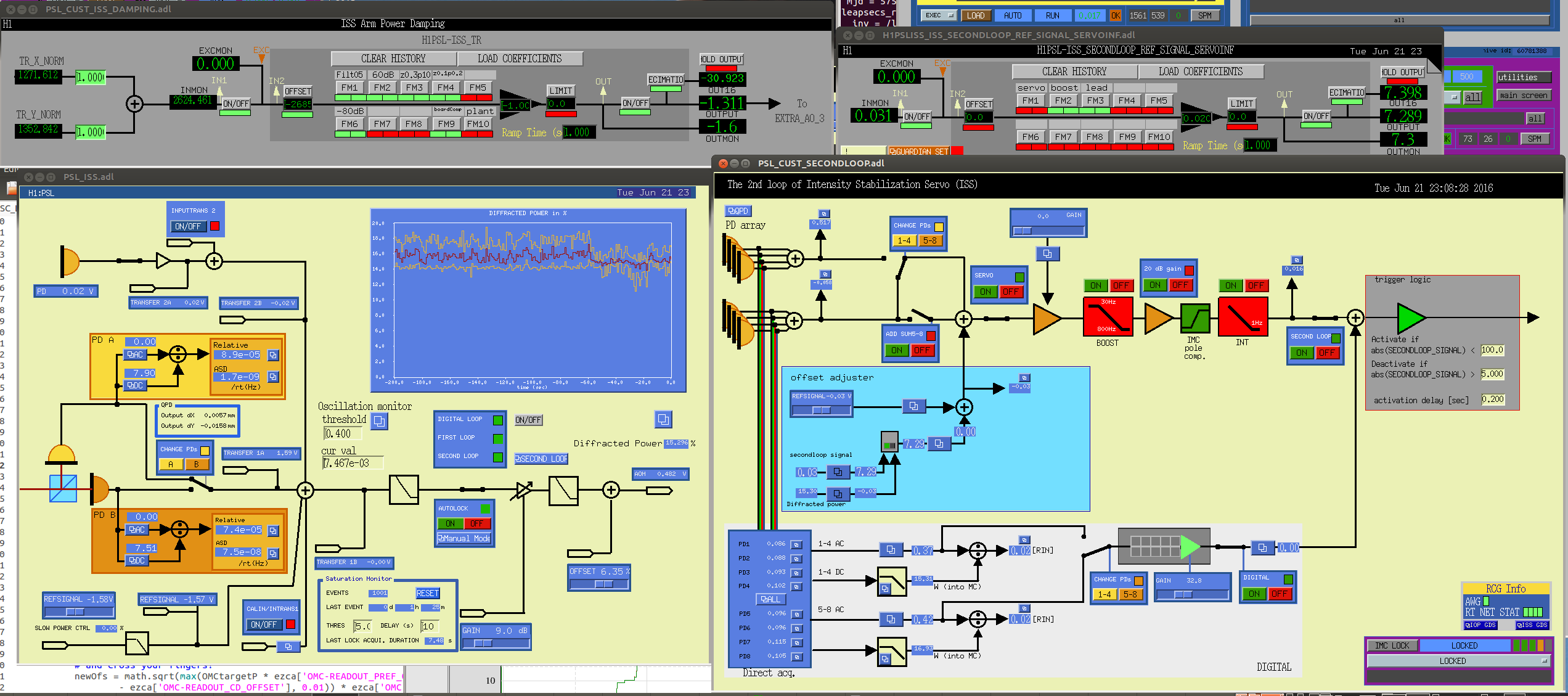
- We have been using the reworked ISS 3rd loop, engaging it by hand with a gain of -1 around 15 Watts and leaving it on as we power up, which seems to work well and takes care of the CSOFT instability. We've been watching the diffracted power as we power up and it seems to stay stable around 15% (4th attached screenshot shows setings) Durring our last locking attempt the 3rd loop had a prblem, which we have not investigated, around 9:18 UTC.
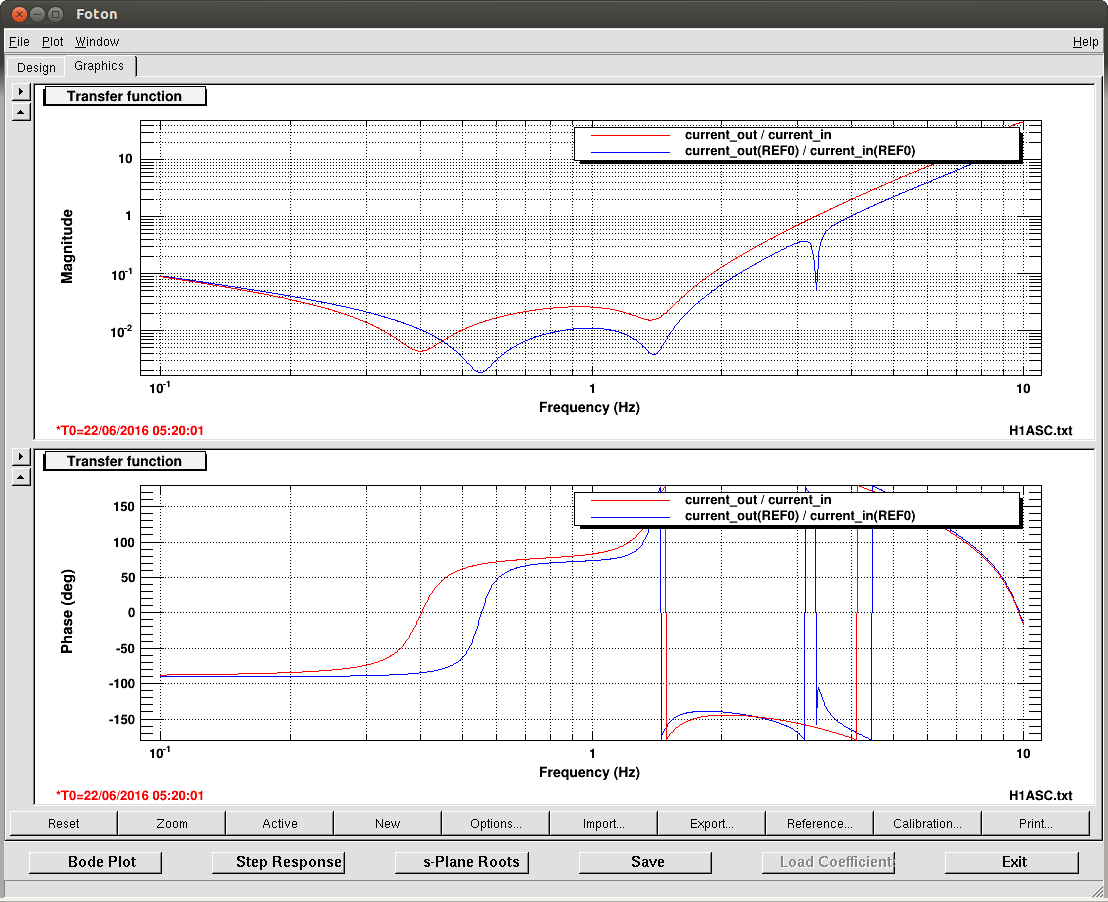
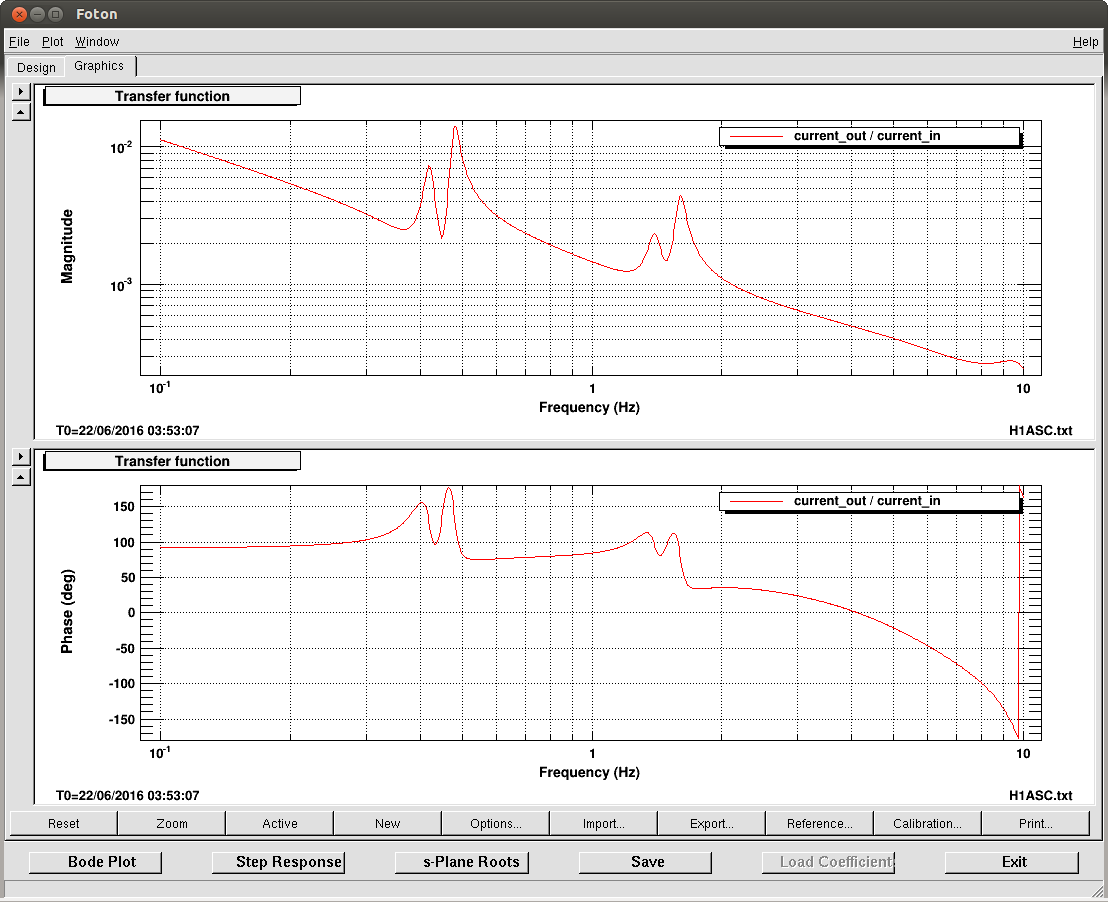
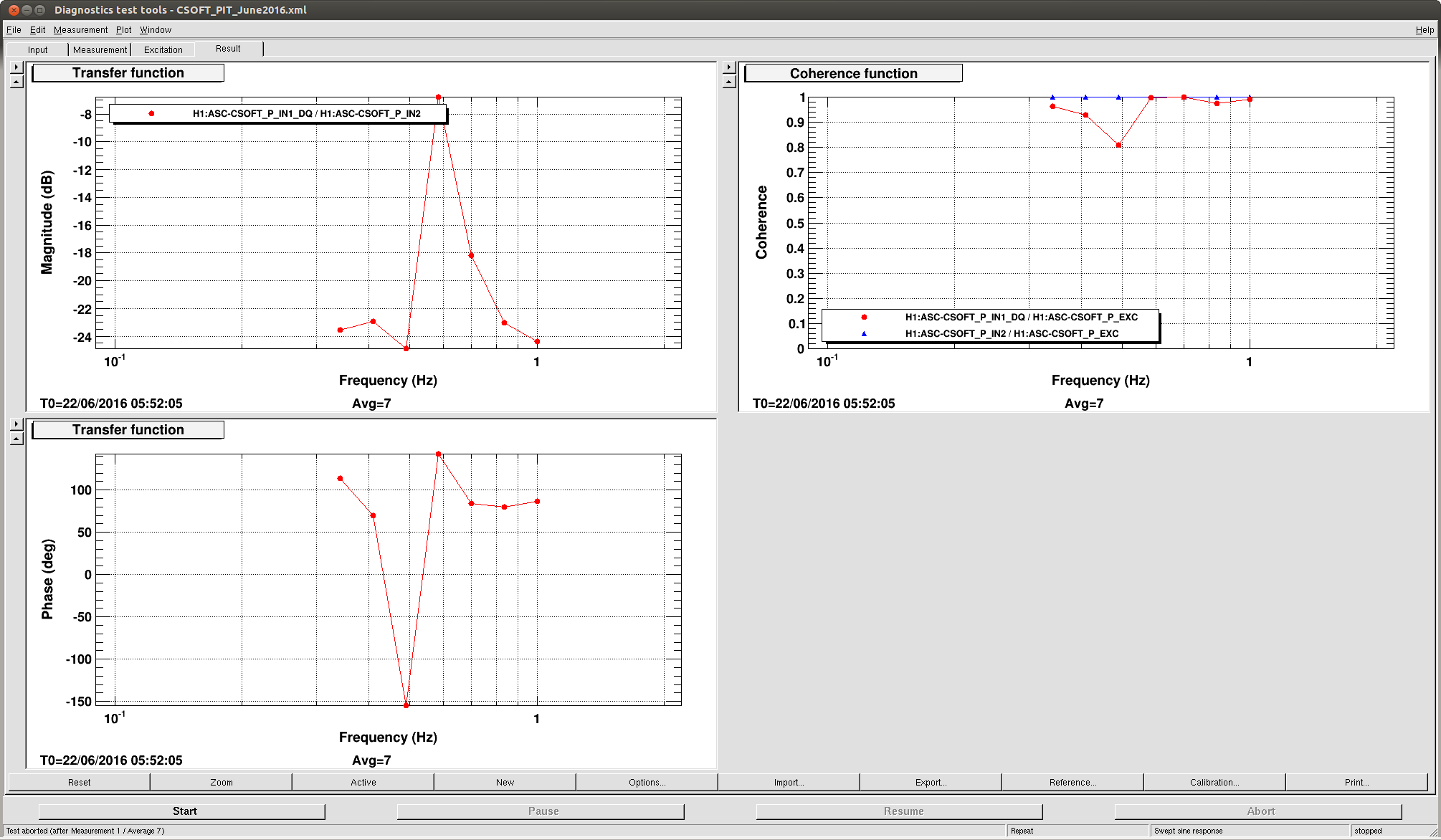
- We've been using a new plant inversion for CSOFT P, which has lower zeros. (1st screenshot is a comparison of the new (red) control filter vs old (blue), second is a model of what the loop should be like with 25 Watts, but with the gain not scaled correctly). We expect that the ugf is now around 50 mHz, which is 20 dB higher than the old ugf. The settings for this loop are now gain -0.045, FM 4,5,6,7,8,9, which is added to guardian, the 3rd attachment shows a measurement of this loop taken at 2 Watts.
- Stefan has been adjusting the CO2 laser to 0 Watts on ITMY and 0.2 Watts on ITMX. Stefan added the rotation stage adjust to the ISC_LOCK guardian, but we can move it to the TCS guardian tomorow.
- Stefan has been using the AS36 -> SRM input matrix, from sunday. We had been opening the loop to power up past 15 Watts, and adjusting SRM a little bit by hand. The guardian currently sets the new matrix for SRM and BS, then turns off the SRC1 once we reach 10 Watts.
- We've added states to the LASER_PWR guardian that go up to 60 Watts, so that we can actually get 50 Watts into the IMC.
- The bounce mode notches are on in the arm ASC loops, which we expect to cause gain peaking.
Our first high power lock broke as we continued to increase the power beyond 50 W and a PI rang up.
Durring our second attempt Terra damped one PI, (separate alog coming) but we lost lock by increasing the power, ringing up a different PI, and ringing up the bounce modes.
We attempted to switch to ETMY at 20W so Terra could try damping a PI on ETMY, but found that we saturated the low noise driver with the high ASC noise we have right now. We engaged the Jenne Low passes in CHARD, which stopped the saturations at 20W, but we started to saturate again and lost lock as we tried to increase the power on ETMY. We will probably need to figure out how to power up on the low noise driver so that we have the option of damping PI on all test masses.
In our last attempt we let the guardian power up to 40 Watts, the power up took about 10 minutes, the only steps we did manually were engaging the ISS 3rd loop and turning off the bounce mode damping. We lost lock at 40 Watts around 9:18 UTC because of a problem with the ISS 3rd loop.

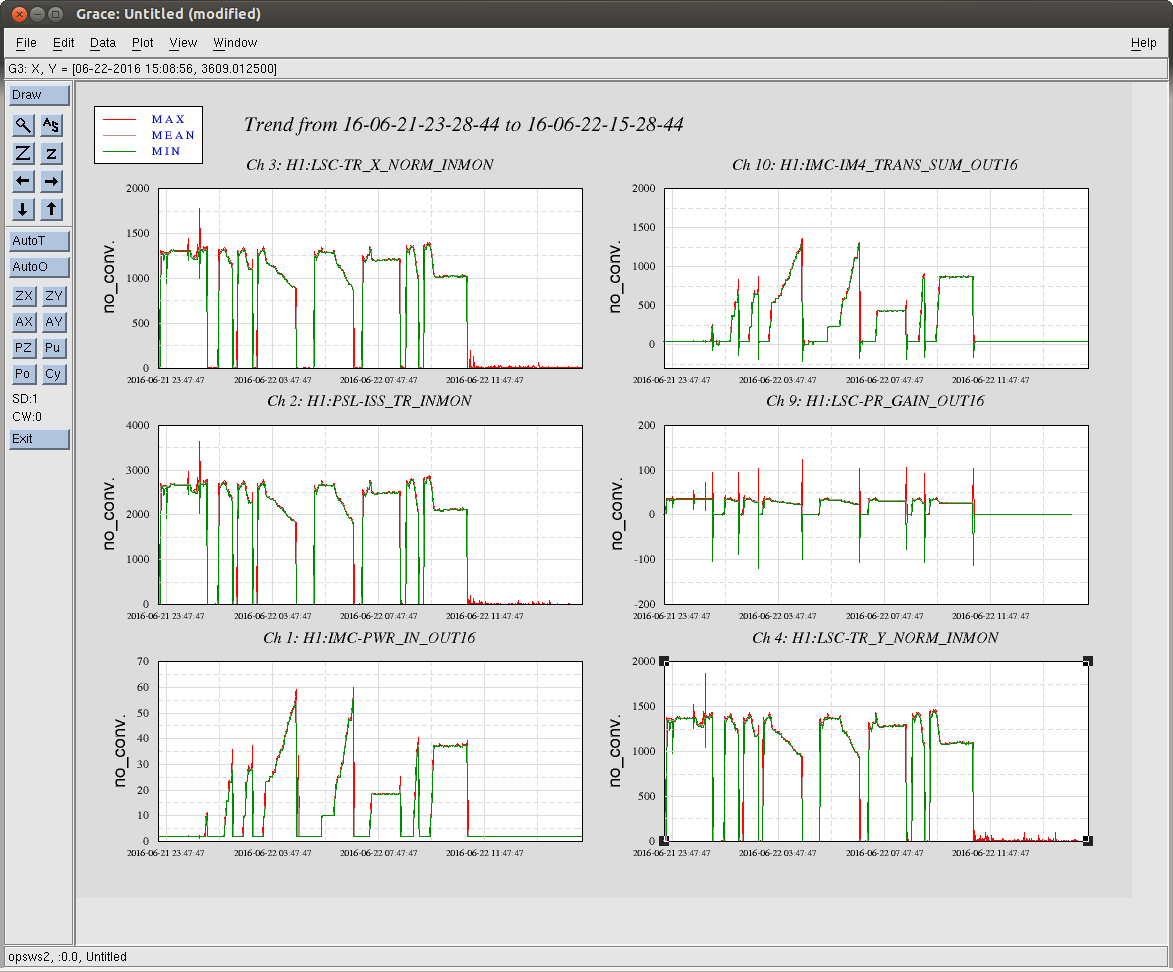
1. During power up from 2W to 50W, power-normalized arm transmission decreases by about a factor of 0.7 (attached).
That's a factor of 0.7 decrease of the optical gain of the 3rd loop. That's probably not enough to make something funny to the 3rd loop but it's something you need to know about.
And anyway, where's the power gone? MC transmission looks good, it should be IFO.
2. It might be possible to engage the 2nd and the 3rd loop at the same time before powering up, and changing the 2nd loop offset slider while powering up.
The reason why we need to adjust the offset is because the 2nd loop is DC coupled. Before engaging the 2nd loop (or 3rd loop) we run the offset adjustment servo, which is very slow due to double 0.1Hz pole in the offset path plus one 0.1Hz pole in the 2nd loop servo path itself. It's somewhat accelerated by digitally undoing a part of the delay, but it's impossible to undo three 0.1Hz poles without saturating the board badly.
However, once the 2nd loop is engaged, we only have to fight against two 0.1Hz poles to change the offset, so the task is somewhat easier (and quicker).
3. For engaging 2nd loop and 3rd loop at the same time, we need to change 3rd loop filter.
In principle all we need to do is to disable FM9 (boardComp) and set the gain correctly.