conor.mow-lowry@LIGO.ORG - posted 15:52, Wednesday 22 June 2016 (27917)
BRS sensor correction Vs STS2 position
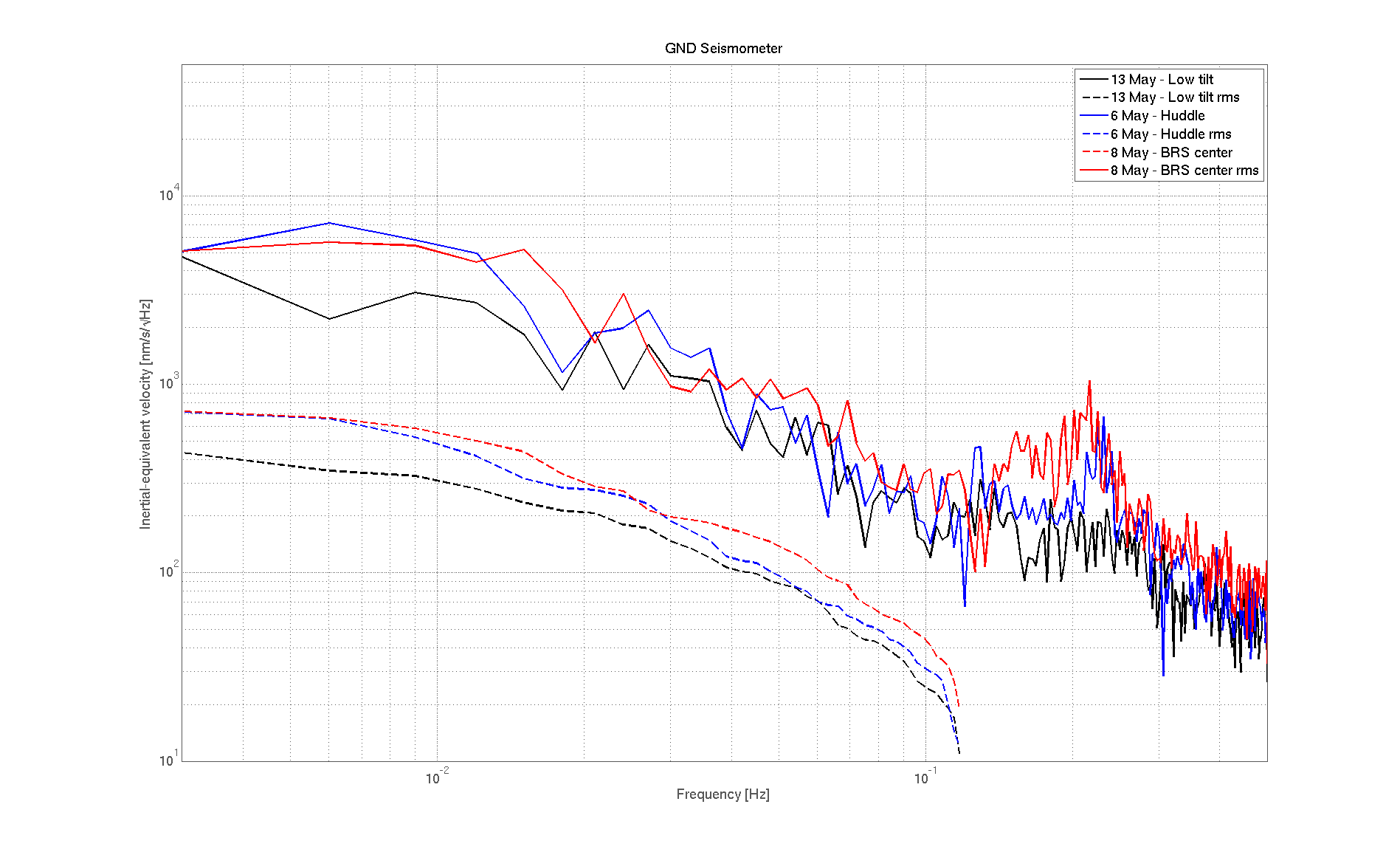
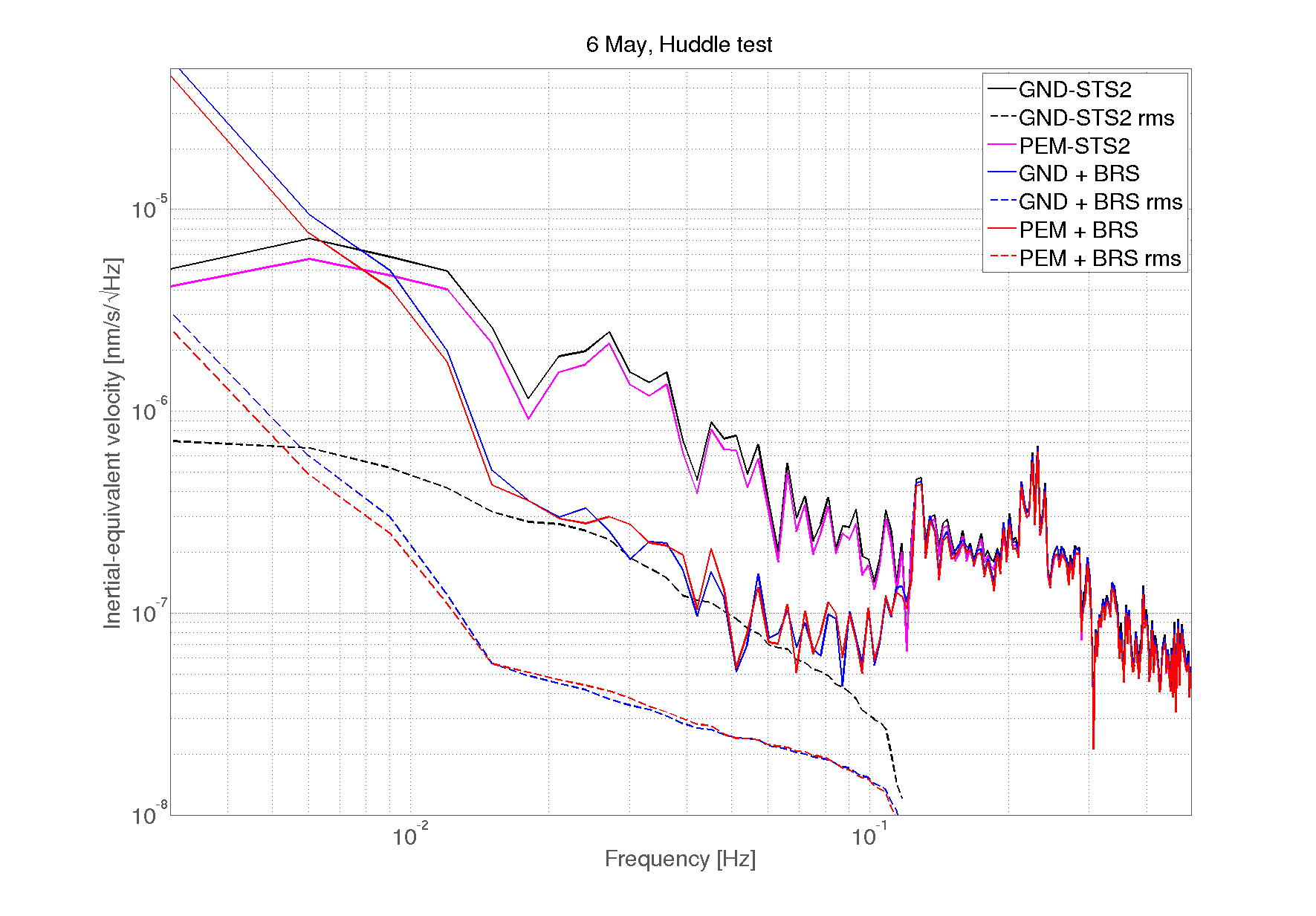
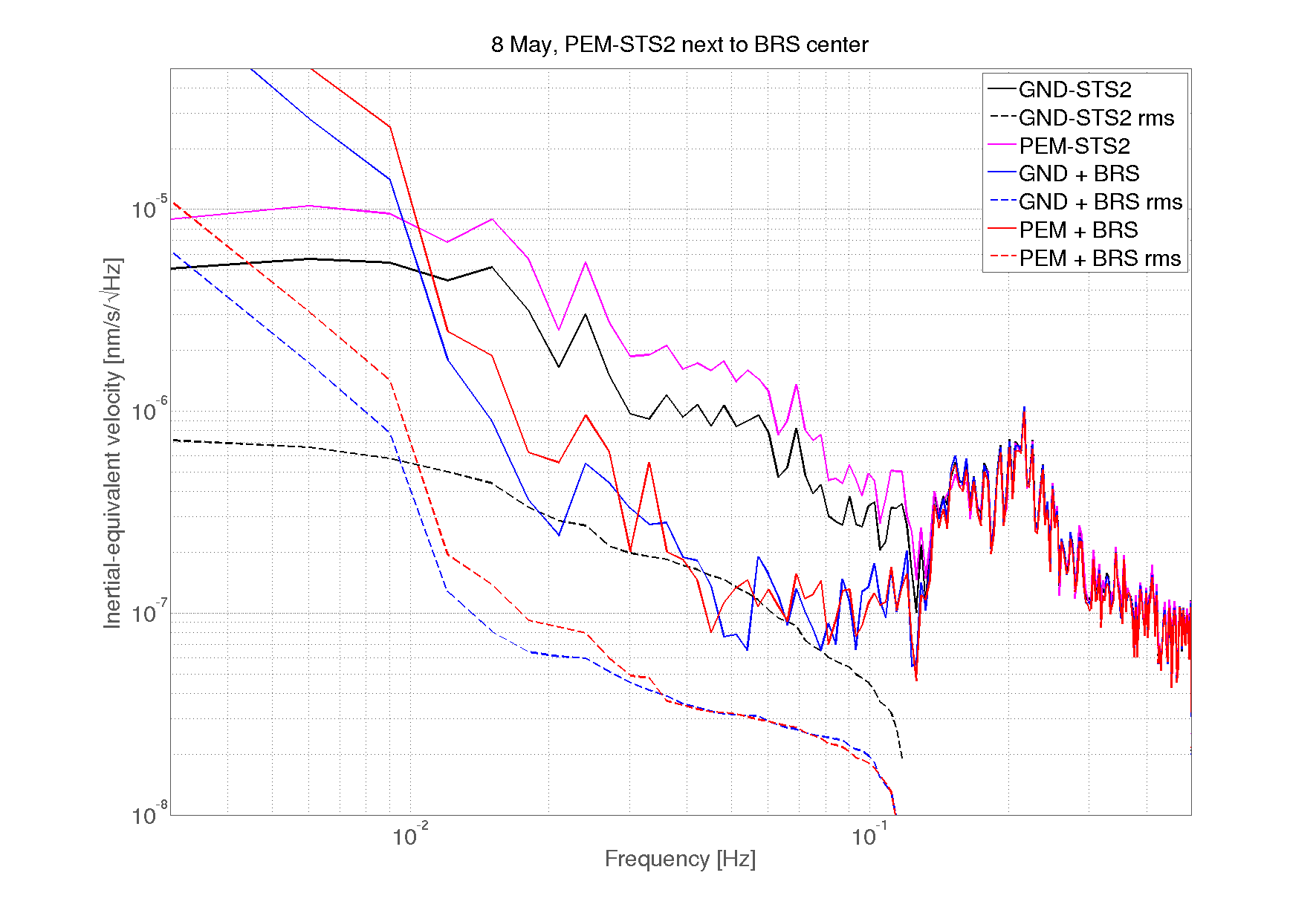
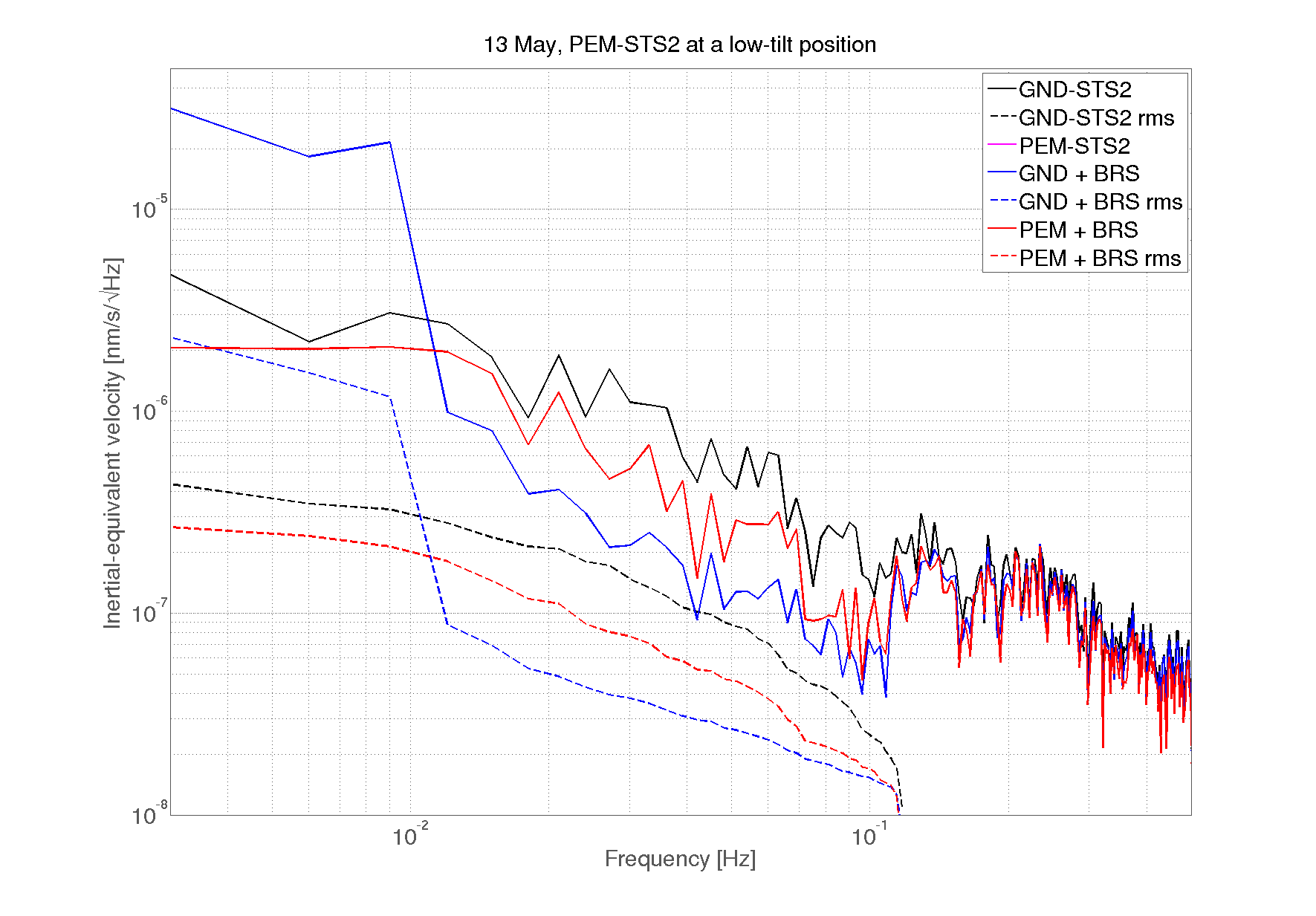
Conor, Jeff, Jim, Robert, Krishna - Maximising coherence between the GND STS2 and the BRS is not necessarily the right move. - Small gains at low frequencies might be made by moving the GND STS2 by some 10s of centimeters. - Designing sensor-correction filters using offline data provides immediate quantitative performance metrics. Robert's aLOG of ~1 month ago, 27170, showed that coherence between seismometers (and the BRS) changes very rapidly with distance, presumably due to warping of the floor or the wind acting like incoherent local sources. It was also apparent the magnitude of the tilt changed by a factor of ~5 or more from the edge of the slab to a position far from the walls. I wanted to see what the BRS-corrected seismometer performance is like as a function of position. Unfortunately the BRS-corrected sensor isn't saved to science frames (H1:HPI-ETMY_STSINF_C_Y_IN1_DQ), and it really should be. On the other hand it made me import all the appropriate filters into Matlab to perform offline sensor correction. This allows me to evaluate whether we should move the Ground STS2 to a position that is more coherent with the BRS. Attachment 1, 'GND_spectra.png' shows that the ground motion spectrum is roughly equivalent in the three cases I looked at: 1) 06 May, STS2 huddle 2) 08 May, PEM-STS2 right next to BRS center 3) 13 May, PEM-STS2 at a position with low tilt, on the far side of the BSC, as far from the walls as possible. These correspond to points 1, 3, and 6 from Robert's post. 1) Huddled STS2s, attachment 2, 'Huddle_BRS_correction.png' Sensor correction works nearly identically on both devices, using the low-frequency cumulative RMS as a figure of merit. Note that I only accumulate RMS below the microseism to better see sensor correction performance. To get this level of sensor correction, I had to multiply the BRS output by 0.85 for the GND device, and 0.7 for the PEM device (in addition to the 'match' filter of 0.85). This means that, even when huddled and coherent, there is ~18% less tilt in the PEM device. This is the cause of the better low-f performance, where incoherent BRS noise dominates. 2) PEM next to BRS center, attchment 3, 'BRS_center_BRS_correction.png' The coherence between the STS2 and the BRS at this position is slightly higher than at the GND position. Perhaps this is visible near to 0.1Hz. However, to get good performance, I had to multiply the BRS out by 1.5. This factor is solely responsible for the worse low-frequency performance. 3) PEM at low-tilt position, attachment 4, 'low_tilt_BRS_correction.png' Due to its 5.5m distance from the BRS and GND-STS2, there is almost coherence below 0.1 Hz. The best RMS performance comes, unsurprisingly, with no BRS sensor correction. The corrected seismometer wins by a factor ~2 down to 10mHz. My conclusion from all this is that: Moving the GND-STS2 to increase coherence is not the correct thing to do. Moving it ~40cm may surprisingly result in a 18% reduction of noise injection from the BRS with no real loss. There may be additional gains to make in this fashion. Moving the BRS to a lower-tilt position, along with the GND-STS2 may help, but ideally the BRS will be in a place with higher, but still coherent tilt. Conclusion #2: while looking at this sensor correction, it became clear that significant gains can be made in the BRS sensor correction performance both in global gain and in the high-pass BRS blending filter. I will try to find a long, windy period for 'training' this filter. Conlusion #3: placing STSs in low-tilt positions (like STS_ITMY in the beer garden) is already quite beneficial, at the factor 2 or more level. The low-tilt position at ETMY seems to perform as well as the buried seismometer, and for some reason much better during the 13 May stretch of data.
Images attached to this report