conor.mow-lowry@LIGO.ORG - posted 16:01, Monday 27 June 2016 (27986)
ETMX BRS sensor correction tweaks
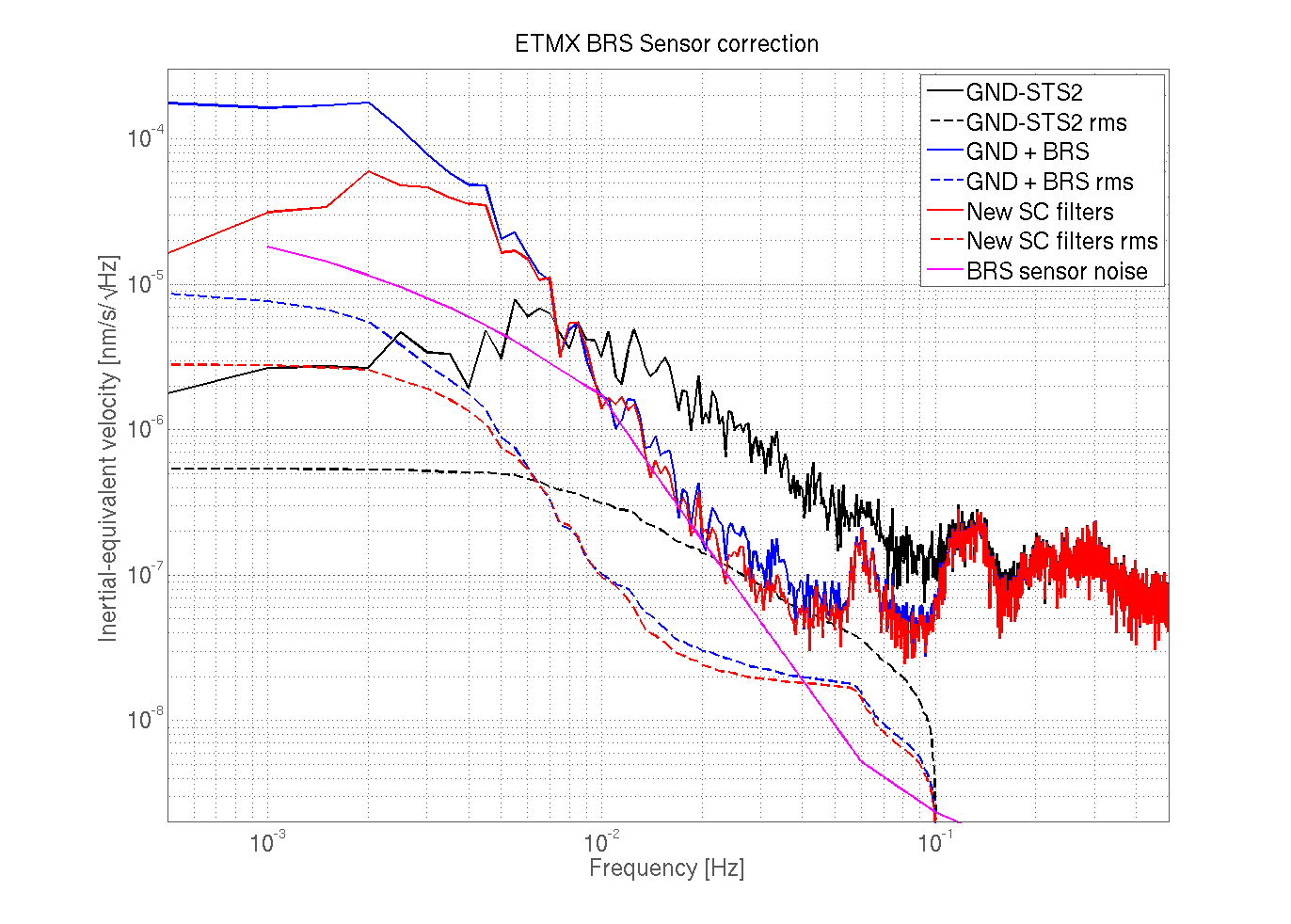
As per the earlier alog for ETMY BRS sensor correction aLog 27941, I ran offline date (the same 5 hours stretch) through sensor-correction filters in Matlab, trying to optimise the subtraction and improve the low frequency velocity RMS. As per the Y-arm, we reach BRS sensor noise by about ~15-20mHz, and we can gain a factor of a few at 1mHz, and improve subtraction between 10 and 100mHz. Performance is shown in the attachment. The black curves show the GND-STS2 output, the blue curves show the GND output corrected for tilt by the BRS using the previous filters. The red curves show the performance with new sensor correction filters. In all cases, RMS is only accrued below 0.1Hz to exaggerate the differences. The Magenta curve shows the approximate BRS noise floor, but this still doesn't seem quite right below 10mHz. Coherence is pretty much as per ETMY. Change summary: - Moved the zero in the 'Torque' filter bank from 0.1mHz to 0. - Moved the high-pass filter. In this case, I found 6.2mHz gave the best subtraction. - Moved the acc-to-vel pole from 2->1mHz. - Changed the match from 0.79 to 0.87. - Moved the pole in 'Zero_Inv' from 0.5mHz up to 3mHz.
Images attached to this report