Not much IFO up time so far, but this morning I managed to move SRM in both pitch and yaw, and see a reduction of the noise. I recall this was already know. Moving pitch by about +20 urad seems to give the best position. Also the SRC1_P error signal respond quite well to the motion, and it seems to cross zero at the right position. Also, after SRM pitch is aligned, the SRC1_Y error signal repond to yaw motion of the SRM. So it looks like we should be able to close SRC1 both P and Y, although with small bandwidth.
The attached plot shows:
- first row: BLRMS of the "jitter noise";
- second row: the offsets I was adding to SRM alignment
- third row: SRC1 error signals.
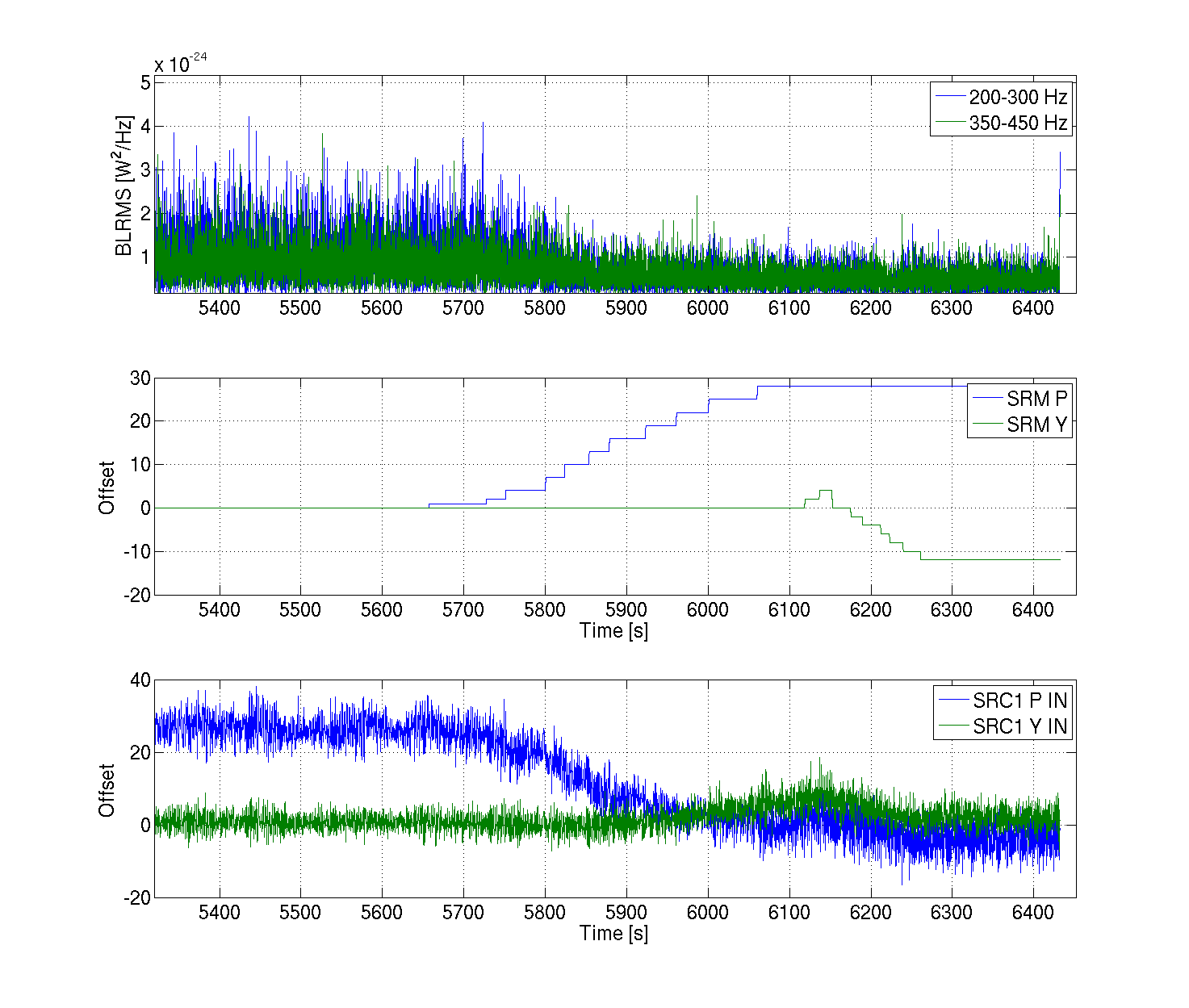
For the record, SRC1's error signal is AS_A_45_I for both pitch and yaw at the times he's looking (it gets switched to this in the SRC_ASC_high_power state, since we were considering these as candidates earlier).