evan.goetz@LIGO.ORG - posted 17:35, Wednesday 07 December 2016 (32329)
GDS filters using incorrect front-end inverse sensing function filter file
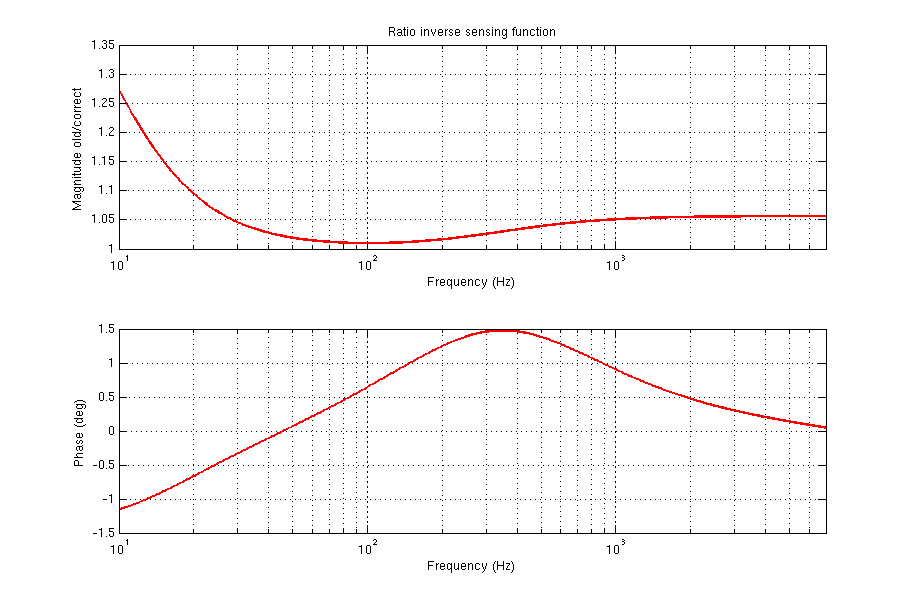
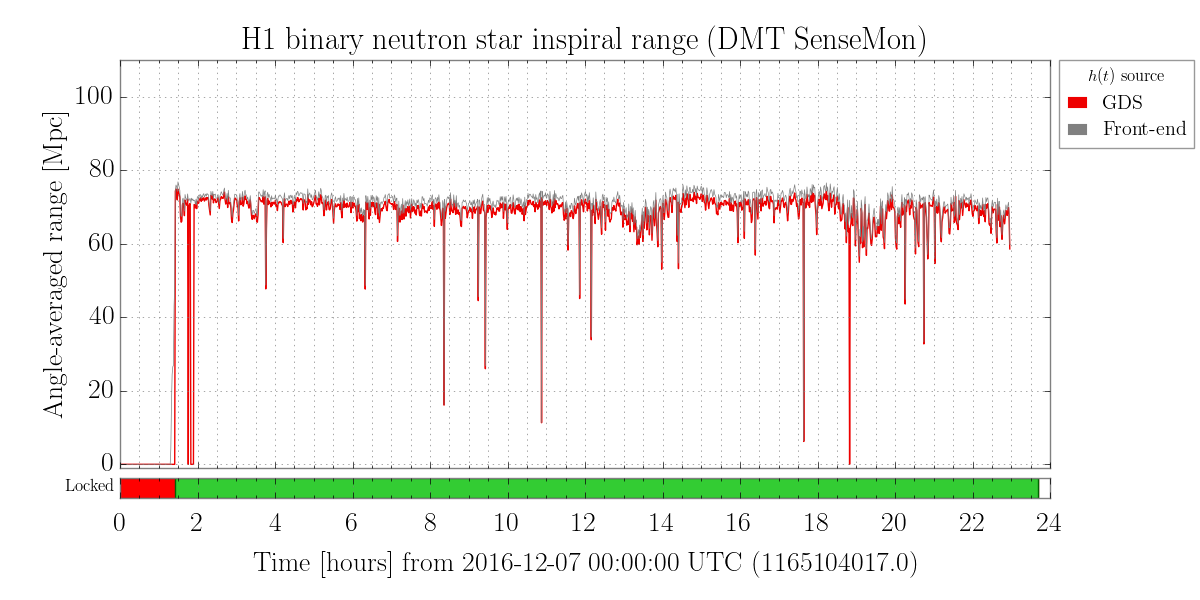
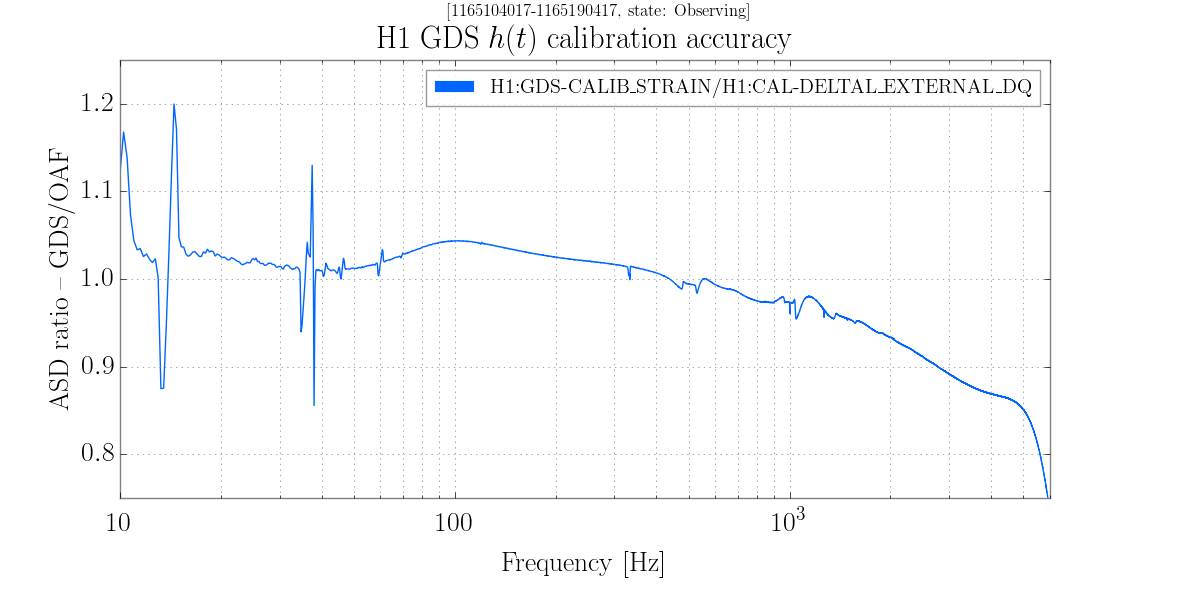
Evan G., Jeff K. Today we identified the H1 parameter file used for the reference model calibration had an incorrect parameter set for loading the inverse sensing function Foton transfer function file. The old file was from pre-ER9 and was when the instrument was running at 50 W. Since we have a different reference sensing function, this file needs to be updated and replaced. This parameter and associated file is only used in the GDS pipeline. Therefore, the EPICS records and front-end do not need to be updated. Unfortunately, this change means that the GDS pipeline filters will need to be regenerated. The updated file is stored at: /ligo/svncommon/CalSVN/aligocalibration/trunk/Runs/ER10/H1/Measurements/Foton/2016-12-07_H1CALCS_InverseSensingFunction_Foton_SRCD-2N_Gain_tf.txt The parameter file has been updated to include this. The reference model parameter files should now be: /ligo/svncommon/CalSVN/aligocalibration/trunk/Runs/ER10/Common/params/IFOindepParams.conf (rev3829) /ligo/svncommon/CalSVN/aligocalibration/trunk/Runs/ER10/H1/params/H1params.conf (rev3922) /ligo/svncommon/CalSVN/aligocalibration/trunk/Runs/ER10/H1/params/2016-11-12/H1params_2016-11-12.conf (rev3855) The first attached figure is a comparison of the old inverse sensing function / correct reference inverse sensing function. The low-frequency change is because running at 30 W vs 50 W causes ~2-3 Hz shift in the detuned SRC spring frequency. The mid and high frequency change is because the coupled-cavity pole frequency is different by ~5 Hz and there is a small change in the overall gain, ~5% Fortunately, we expect the inspiral range computed from GDS to increase. This is because the correct inverse sensing function is smaller than the old inverse sensing function. Since the calibration works as DeltaL = (1/C)*d_err + A*d_ctrl, then with a smaller, correct (1/C), we expect that the displacement noise to be smaller than with the old, incorrect, and too large (1/C). We expect that this may correct some of the discrepancy observed between the GDS pipeline and front-end calibration as shown by the inspiral range (second attached figure). However, we do not think that all the discrepancies will be corrected between the GDS pipeline and the front-end calibration (see third attached figure).
Images attached to this report