jeffrey.kissel@LIGO.ORG - posted 16:04, Tuesday 25 July 2017 (37773)
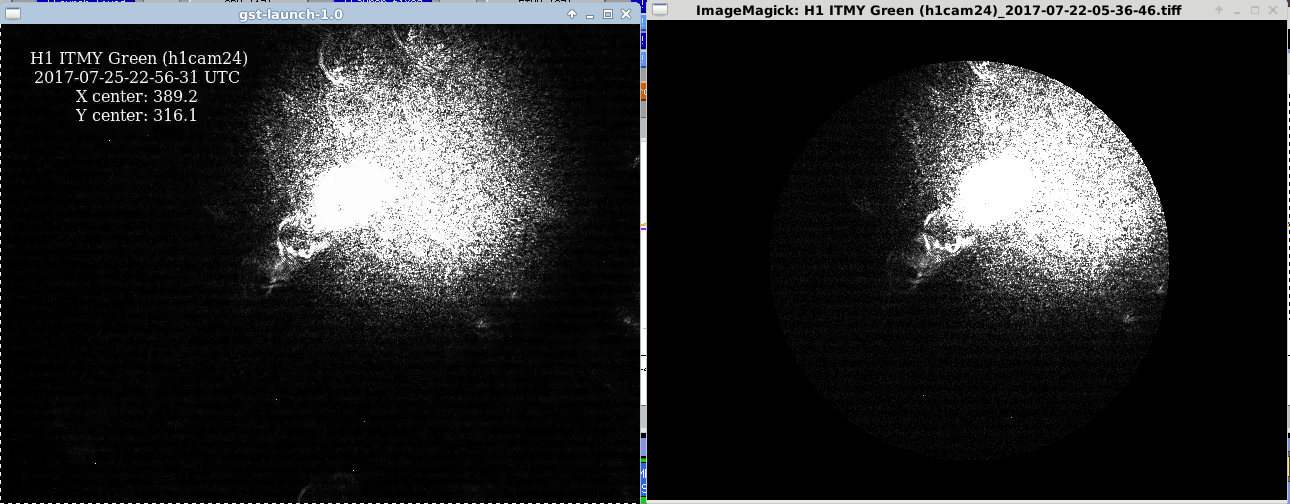
ITMY Green Camera
J. Kissel, S. Dwyer, T. Shaffer
We'll debugging the Y-ARM alignment during initial alignment, we went back to the camera archive,
/ligo/data/camera/archive/${YYYY}/${MM}/${DD}
and found -- comparing against the live camera -- that the mask that is used to calculate the centroid for the ITM green camera is poorly aligned with the green spot on the camera.
This is just a note that we should fix this once we're happy with an alignment that gets the IFO back up.
Images attached to this report