TJ, TVo
We opened the CO2 laser tables to look at the direction of the picomotor actuation in order to confirm the ITM HWS orientation based off of aLOG-35336.
| Picomotor Counts Request | Actuation Screw Direction |
| +YAW | Clockwise |
| -YAW | Counterclockwise |
| +Pitch | Counterclockwise |
| -Pitch | Clockwise |
Comparing our results to Aidan's, we match in pitch but disagree in yaw.
The above table is true for both ITMX and ITMY (as expected). If correct, this means that the aLOG-35336 analysis of the point absorber would have a flip in the horizontal direction and would predict the point absorber is on the lower right of ITMX as viewed from the BS. We will double check this with Aidan.
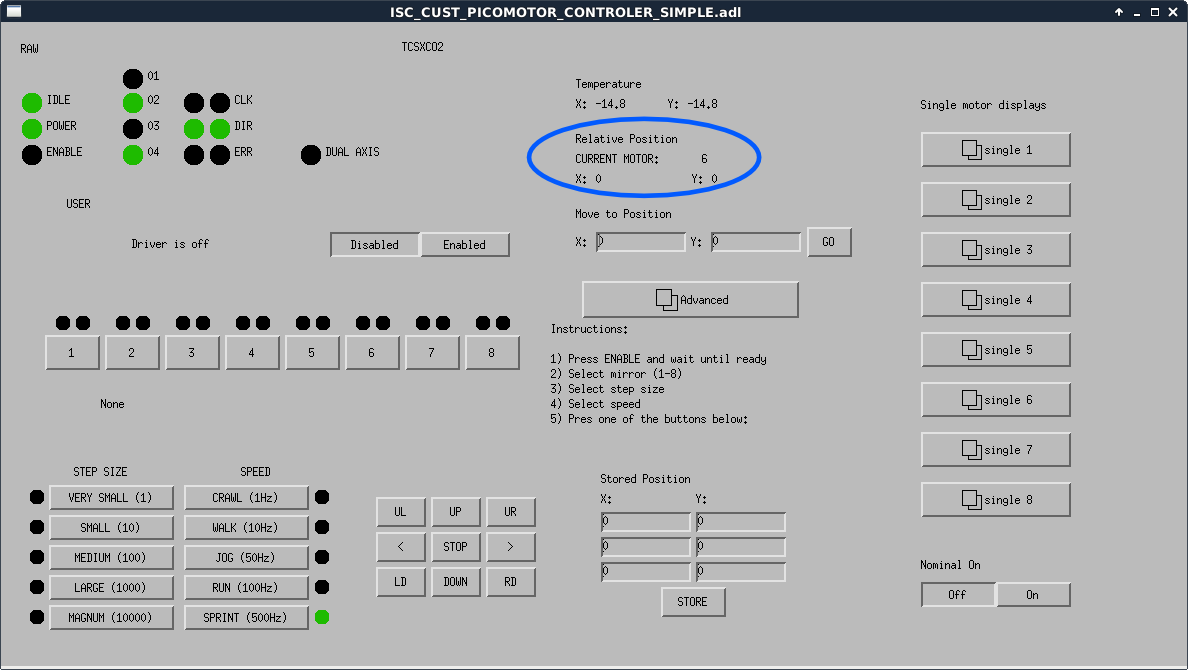
Edit: To clarify what I mean by "Picomotor Counts Request", I only used the readback from the channels denoted in attached screenshot by a blue ellipse:
H1:SYS-MOTION_C_PICO_F_CURRENT_X_POSITION & H1:SYS-MOTION_C_PICO_F_CURRENT_Y_POSITION
where X-axis is referring to YAW & Y-axis is referring to PITCH.
Is it possible to have this changed in software? I would think it'd be more consistent if clockwise was adopted to be the + direction for both yaw and pitch, rather than having to remember that it's positive for one and negative for the other.
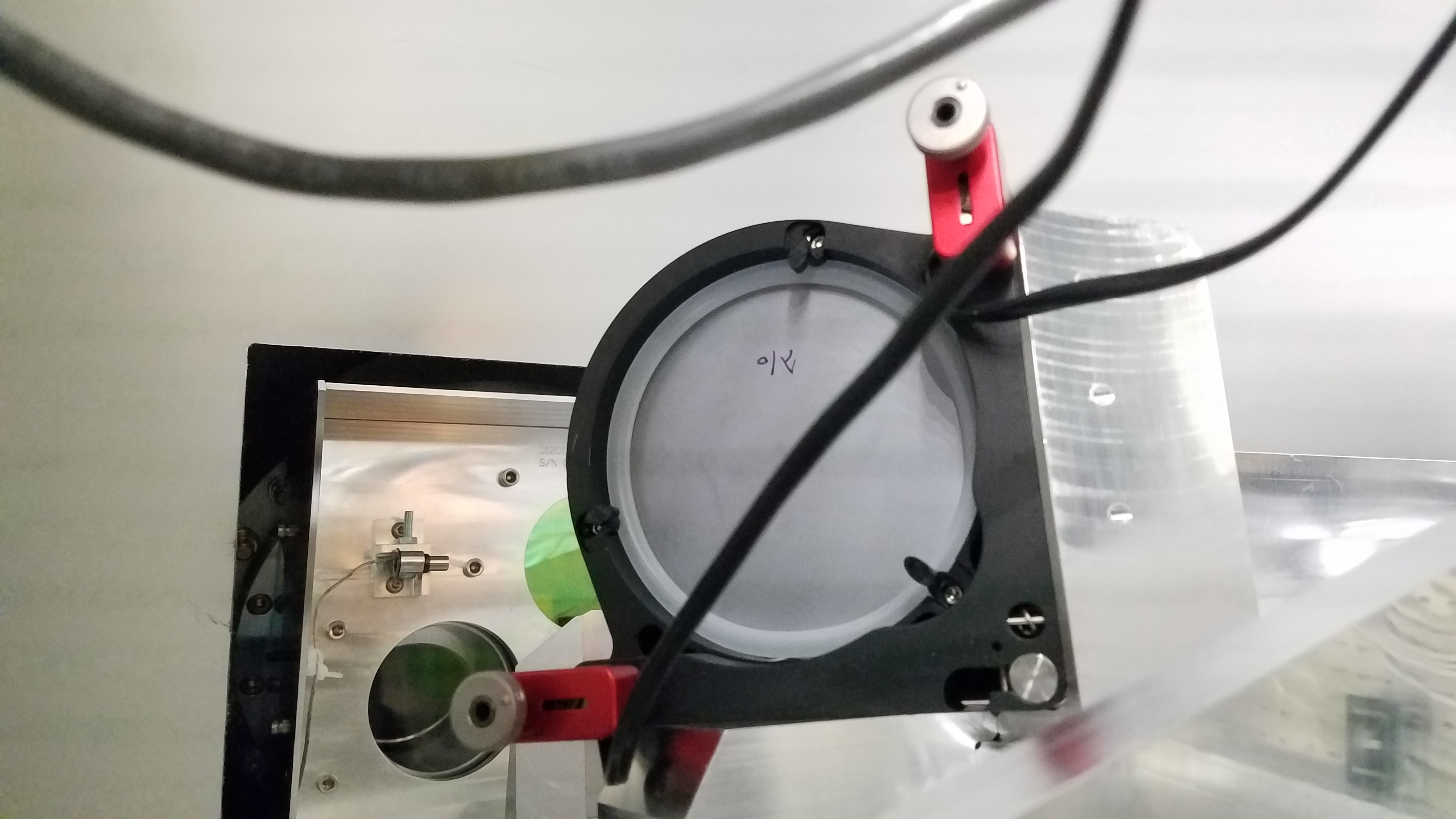
Here are a few pictures and a link to a video of the knobs moving with our audio.
Video: LIGO-G1701750
1st attachment: Wide view of steering mirror
2nd: view if threads. These appear to be standard and not reversed.