TVo, Hang
Yesterday I said that the AS72 scheme might not be working based on that the Q-phase signals vanished for SRM when we applied 600mW ITMX CO2 power (nominal 300mW). However, this might not be a fair claim, as the current scheme could not hold the IFO locked for more than 1 hour under 600mW CO2X power either. More importantly, it would be unlikely for the IFO to be parked at such a bad TCS setting in the future. Therefore we redid the measurements, focusing on examining the stability in the vicinity of the nominal TCS setting, and it seemed that the AS72 scheme had a decent performance if the TCS was not way off.
CONCLUSIONS:
1. The AS72 scheme works for the current IFO. (A possible sensing matrix: A_Q -> SRM, B_Q -> BS).
2. The AS72 scheme for SRM is more robust than AS36 if the TCS is at least good-ish (within +- 100mW from nominal)
3. BS signals are in general more robust against thermal lensing than SRM signals. This is the case for both AS36 and AS72.
4. The current SRM ASC using AS_A_RF36_I seemed not a great choice. The B_RF36 sensor had a much better response.
DETAILS:
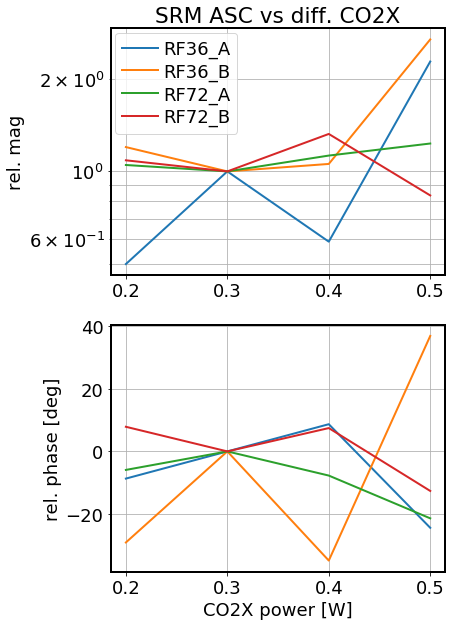
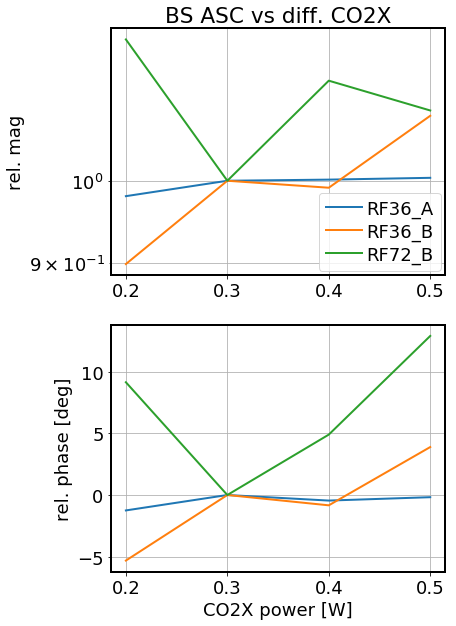
i). We measured SRM/BS response at different CO2X power levels, ranging from 200mW to 500mW w/ 100mW stepsize. The nominal sensing matrix with 300mW CO2X was shown below. As a reference point, the noise level for the AS72 is about 0.3. As a caveat, so far we only measured the response amplitude; the sign is not yet available and will be provided with offline analysis.
| A_I | A_Q | B_I | B_Q | ||
| SRM | RF36 | 88 | 190 | 780 | 800 |
| RF72 | 2.0 | 1.3 | 0.77 | 0.52 | |
| BS | RF36 | 110 | 2800 | 1150 | 2200 |
| RF72 | 0.36 | 0.73 | 1.2 | 1.1 |
where the bold-orange numbers are the ones used in current RF36 ASC, the red-italic numbers are possible error signals for the RF72 scheme.
ii). How the sensing signals varies under different TCS setups are shown in the first two plots attached (first one for SRM, second for BS).
iii). Because we needed to drive SRM/BS in angle hard enough to see the signal in RF72, the drive cross-coupled to length loops even we notched the ASC loops. Therefore we also drive the SRCL/MICH in length to match the cross-coupled amplitude from angular excitations. The l2a leakage was below the noise floor for RF72 so it should not contaminate our measurements significantly. For RF36, the SRCL to SRM pitch leakge seemed as large as the angular signal itsef for A_I, the one currently used (!!!).
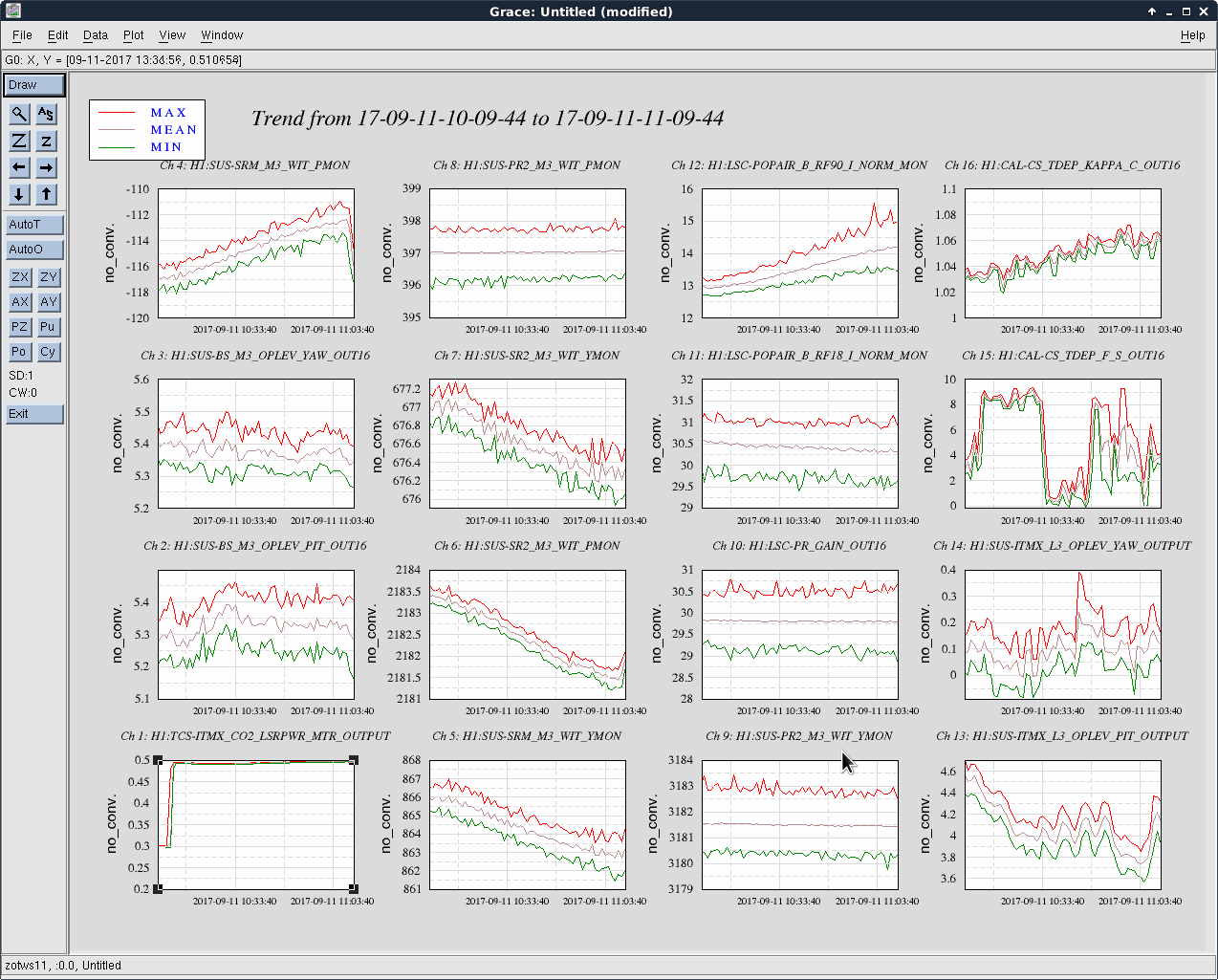
iv). In case people are interested in seeing how the TCS affecting other loops, in the third figure we show the data trend where we changed the ITMX CO2 power from 300mW to 500mW. The SRM/SR2 can drift as much as 2-3 urads due to thermal effects. Also ~1h after the CO2 laser power change, the IFO became unhappy and we have to revert the CO2 power back to 300mW to remain locked.
We have the sensing matrix calibrated to physical unit in [W/rad], and the results are attached. Both SRM/BS results are consistent with the Finesse simulation. (It seemed that the calibration of SRM actuation strength based on T1000061 is too low. It is a factor of 7 or 8 below the measured [rad/ct] transfer function based on WIT channel response, and with the T1000061 value I could not simultaneously match the measured SRM/BS response to the theoretical expectations. )
Highlights:
1. We should be able to form a non-degenerate sensing matrix using AS72_A_Q -> SRM, and AS72_B_Q -> BS.
2. The AS72_Q responses should be more robust than the AS36_I signal against differential thermal lensing. Moreover, the Q-phase signal should have no first order sensitivity to spot position, making it immune to beam off-centering.
3. The shot noise limited sensitivity is ~0.05 nrad/rtHz for BS and ~2.4nrad/rtHz for SRM. This noise should decrease linearly w.r.t. 118.3MHz modulation depth as long as the total power is still dominated by RF45 SBs.
